Hi. Thanks for your answer.
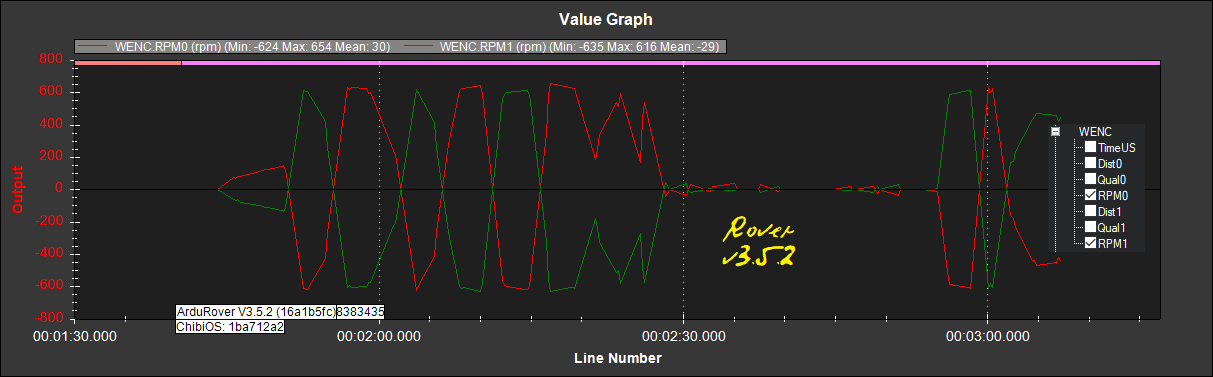
Unless I am still seeing an old version of “Ground testing” here, ‘another’ would mean that in v4.0 on you could do the test both ways. v3.5.2 permitted do an easier test of the encoder signals (in fact, rpm1 and rpm2 change even moving the motors by hand). MAVlink distances are not very informative.
For the motors I use, CPR is not clear, so I wanted to adjust it with a tachometer. So I installed v3.5.2 in a spare pixhawk, and connected there the encoders. With rpm1 and rpm2 I could get values for WENC_CPR and WENC2_CPR (rpm1 and rpm2 as appears in tachometer).
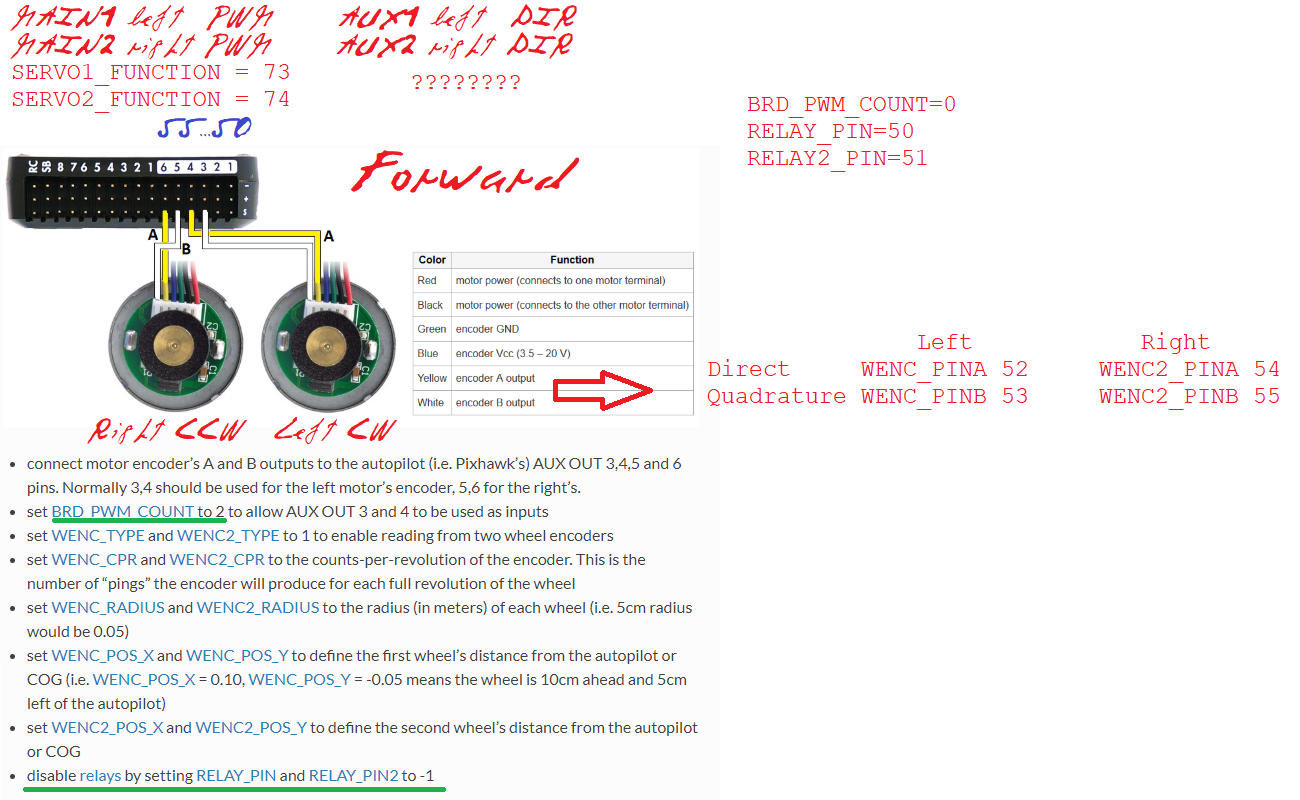
But there is not much information about the connection of the encoder signals. Note that with two motors (left 1 and right 2) there is an asymmetry since for forward movement the left motor (seen from left) turns CCW and the right one (seen from the right) turns CW.
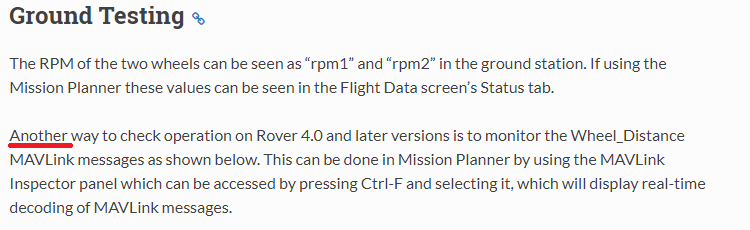
Here appears:
…for rovers with skid steering, “Test motor C” should cause the left wheel to turn forward. “Test motor D” should cause the right wheel to turn forward.
but that doesn’t give indication about encoder signals.
This motors test works for me, and in adition with the vehicle seized, leaning it forward the wheels moves forward and leaning it backwards the wheels move backwards.
For considering the left and right motors asymmetry mentioned above I use:
WENC_PINA,53
WENC_PINB,52
WENC2_PINA,54
WENC2_PINB,55
with:
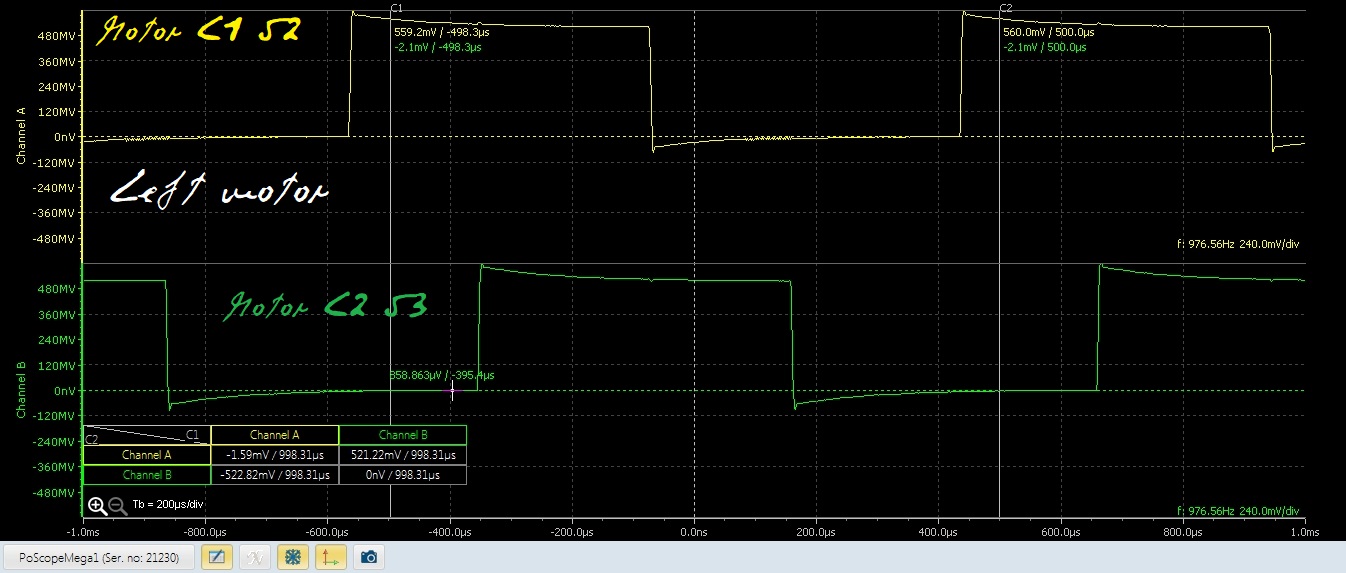
52 (AUX3) going to left motor C1,
53 (AUX4) going to left motor C2,
54 (AUX5) going to right motor C1,
55 (AUX6) going to right motor C2,
(C1 and C2 are the labels on motor encoder signals)
but I cannot find information about if this is correct.
For directions:
MOT_PWM_TYPE,3 (BrushedWithRelay)
RELAY_PIN,50 (AUX1, left motor)
RELAY_PIN2,51 (AUX2, right motor)
For motors PWM’s:
SERVO1_FUNCTION,73 (left)
SERVO2_FUNCTION,74 (right)
better than what appears here (SERVO3_FUNCTION, 74), since in this way connectors are all together and tighter.
But the vehicle is not yet stable even with no RC inputs: it moves back and forward and falls.
This is a log with the vehicle armed (transmitter off (no RC)), first seized by hand and leaned back and forth, and then released on the floor partially (if released completely it goes away and falls: it is unstable):
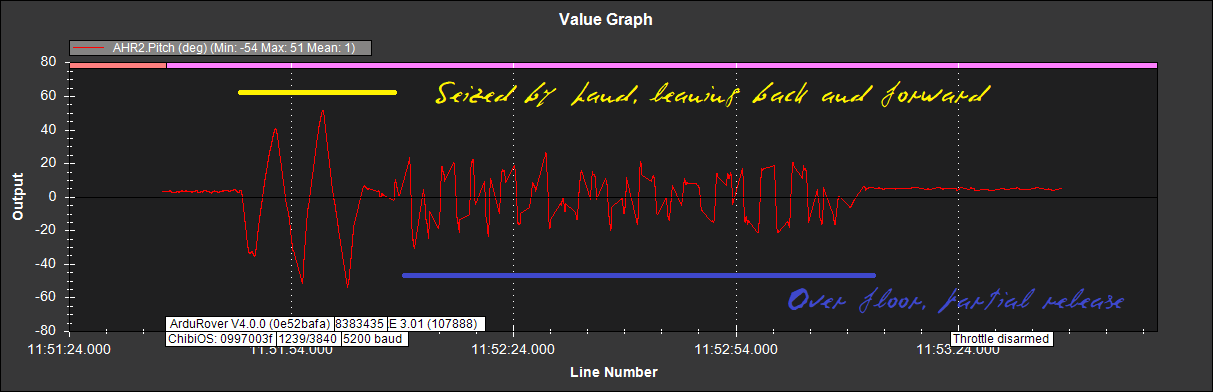
This happens even with a small battery, placed as low as possible.
Varying PID parameters:
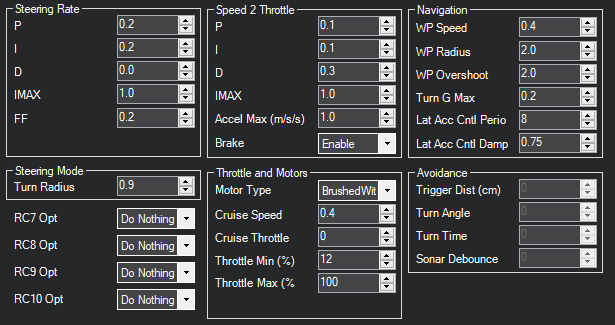
doesn’t change too much this unstable behaviour, so I suppose I have some parameter completely wrong. What can happen?
BTW1
GPS: u-blox 1 saving config
EKF3 IMU0 started relative aiding
u-blox 1 HW: 00080000 SW: ROM CORE 3.01 (107888)
fmuv3 004D0032 3238510C 38383435
ChibiOS: 0997003f
ArduRover V4.0.0 (0e52bafa)
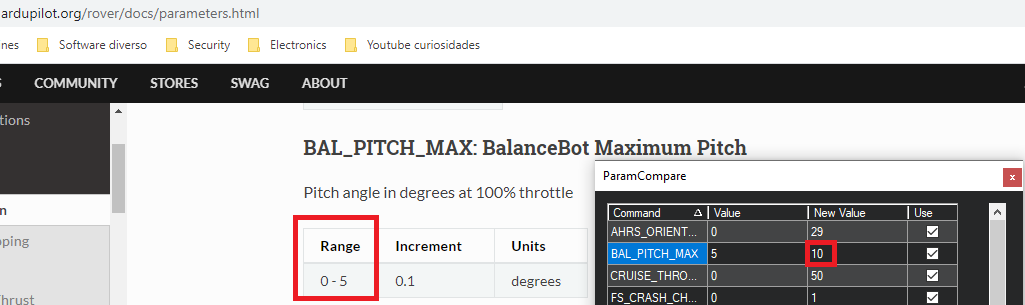
BTW2, it seems that default BAL_PITCH_MAX is 10, but in the rover full parameters list is at most 5: