Rover-4.0.0 has been released as the default/official version and is available through the ground stations including Mission Planner and QGC or via direct download from firmware.ardupilot.org. This version is exactly like -rc4. The list of major changes vs 3.5.2 are in the release notes and also copied below:
Changes vs 3.5.2:
- Path Planning for Object Avoidance (aka Bendy Ruler and Dijkstra’s) replaces “Dodge” avoidance
- Complex Fence support (aka stay-out zones)
- Flight mode changes:
a) LOIT_SPEED_GAIN provides tuning of loiter mode aggressiveness
b) NAV_DELAY command support for clock-based start of mission commands
c) Simple mode (was present in 3.5.2 but was undocumented and untested)
d) SPEED_MIN parameter allows setting minimum speed during missions (reducing slow down at
corners)
e) Follow mode offsets reset to zero when vehicle leaves follow mode
f) Boats loiter instead of circling at end of RTL/SmartRTL
g) Warning sent to GCS when SmartRTL buffer is nearly full
h) Vehicle stays in Auto mode after completing missions using RTL-within-Auto, Hold-within-Auto - Sailboat improvements:
a) motor support
b) tacking improvements
c) NMEA windvanes
d) Sailboat gets dedicated parameters SAIL_LOIT_RADIUS and SAIL_XTRACK_MAX - New flight controllers:
a) Hex Cube Orange
b) Holybro Durandal
c) Sparky2 autopilot firmware available - Sensor and peripheral related changes
a) Fuel flow battery battery types
b) IBUS R/C input support
c) “Inflight” compass calibration
d) NTF_BUZZ_VOLUME allows controlling buzzer volume
e) OSD support
f) UAVCAN improvements including dynamic node allocation
g) WS2812 LEDs
h) Yaw from some GPSs
i) IMU heater control parameters (see BRD_IMUHEAT_P/I params)
j) RangeFinder type parameter clarified for Benewake lidar
k) UAVCAN RTK GPS support
l) UBlox F9 GPS automatic configuration
m) Lightware SF40c lidar driver for latest version - Safety Improvements:
a) Improved watchdog logging allows distinguishing between brown-outs from software failures
b) FS_OPTIONS parameter allows enabling failsafes to trigger while in Hold mode - Bug fixes:
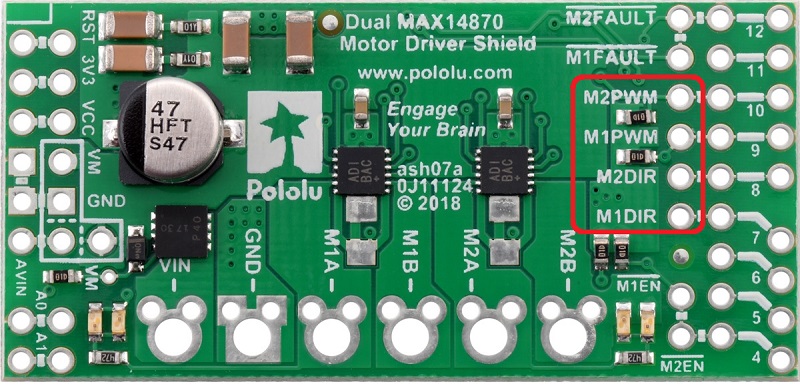
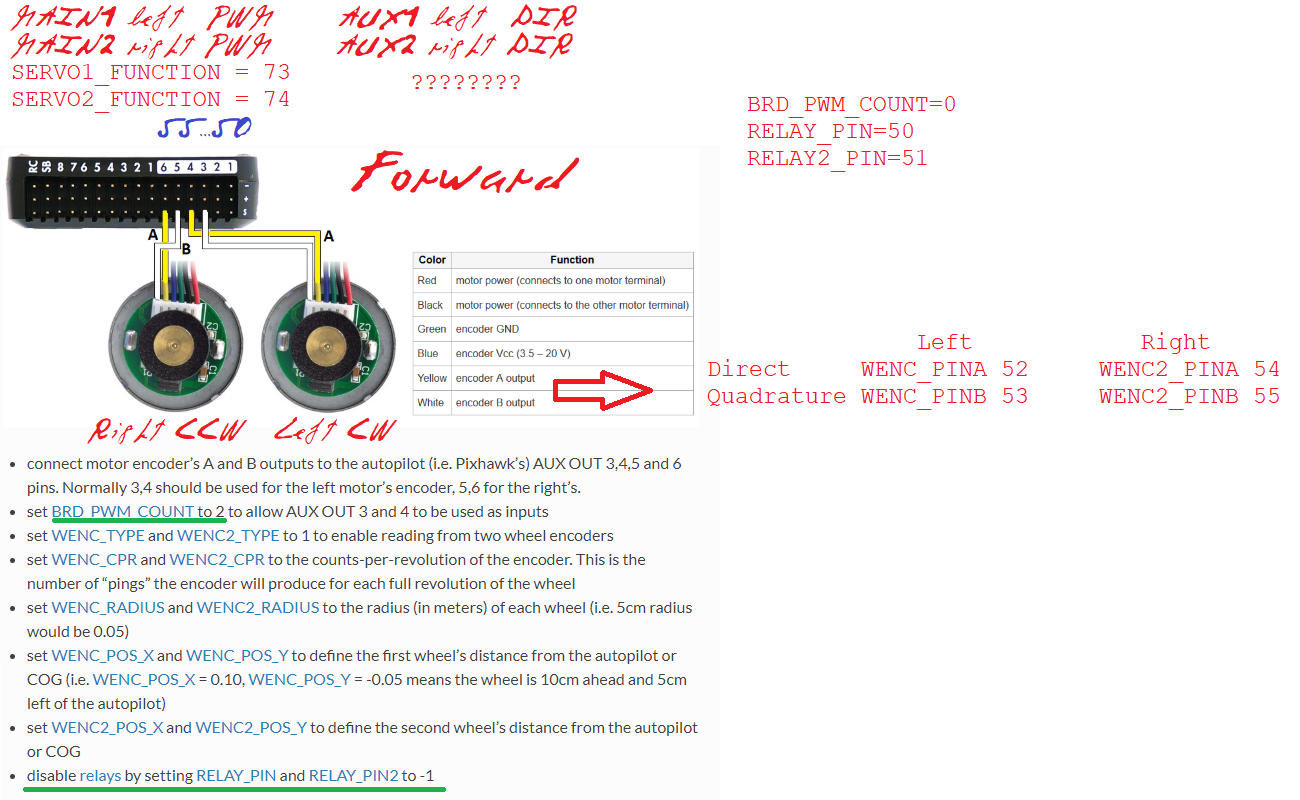
a) Wheel encoder fix to use both wheel encoders (if present)
b) EKF failsafe and pre-arm checks fixed when only wheel encoders used for non-GPS navigation
c) Pre-arm message fix to reports AHRS/EKF issue (was blank)
d) BLHeli fix to RPM calcs and telemetry (aka 0x8000 error)
e) SET_YAW_SPEED in Guided mode made consistent with Auto mission command handling (yaw in degrees, speed in m/s)
f) Barometer PROBE_EXT parameter description improvement
g) Pixhawk4 board LED brightness fix
Thanks very much to all the developers, beta testers, documenters and others who contributed to this release!