Ok progress, cant be certain but I think the wheel drive motors were effecting the heading. so put the electronics on a high platform. Also getting RTK FIX.
However I cant try it because I am getting
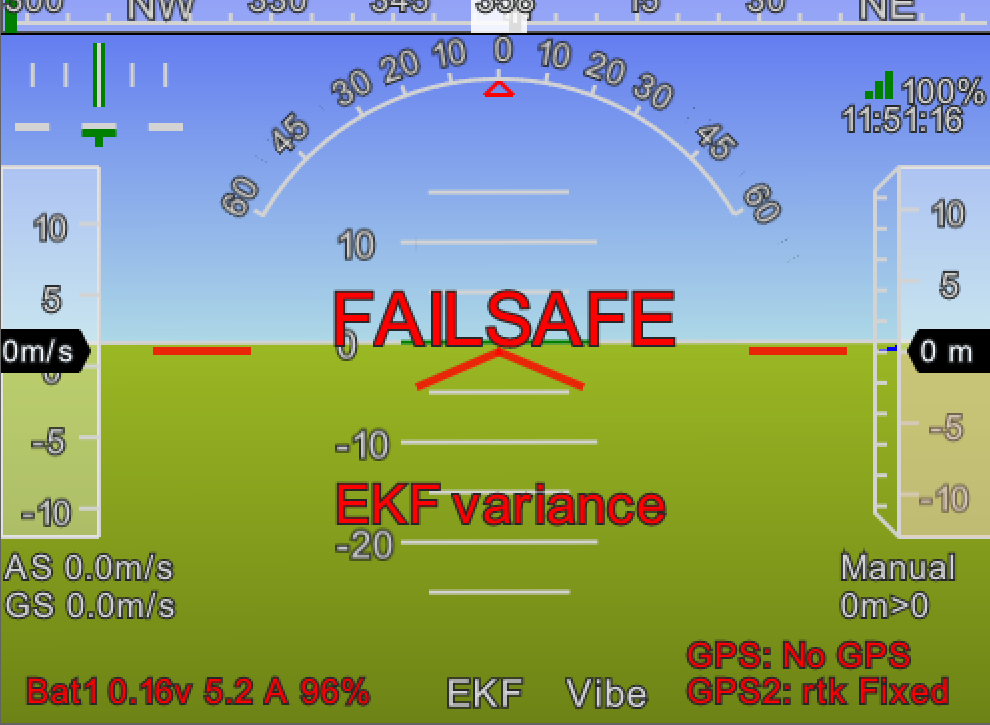
FLIGHT MODE CHANGE FAILED.
EKF VARIANCE.
I recalibrated the compass and accelerometers but same warnings.
Any thoughts?
Thanks for all your help
Hello
I made a radar arch for the boat where all the sensitive equipment is placed in a box (autopilot, compass, gps etc). It works really well, I have had no issues after using the RM3100 and placing it higher on the boat. I have equipment that works against the compass so it was necessary to do this.
Let me know if it works out.
I got the same warnings when using the original compass that came along with it. Whenever you turn on the power of the engines the compass goes wacky. The RM3100 is a military grade magnetometer and is meant to work in noise areas.
I can’t get the RM3100 to work it’s not recognised the only socket on the Pixhawk 4 to plug in is
IC2A the SPI has a much larger socket, did you have to change the plug?
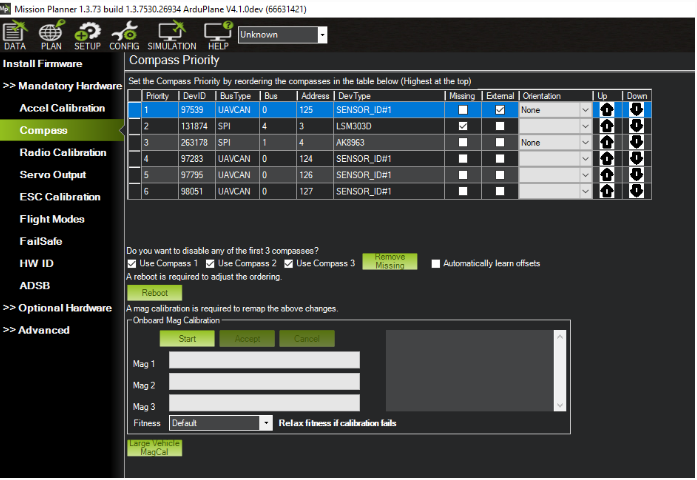
You should plug it in the I2C. If that is already taken, you can buy a I2C splitter module (https://www.flyingtech.co.uk/product/i2c-splitter-module-for-pixhawk-apm-flight-controller/). If you use MP, it should recognize it in the compass section. You have to tic it of in the compass section:
I am using a pixhawk 6C, but it also worked on my orange plus, black cube etc.
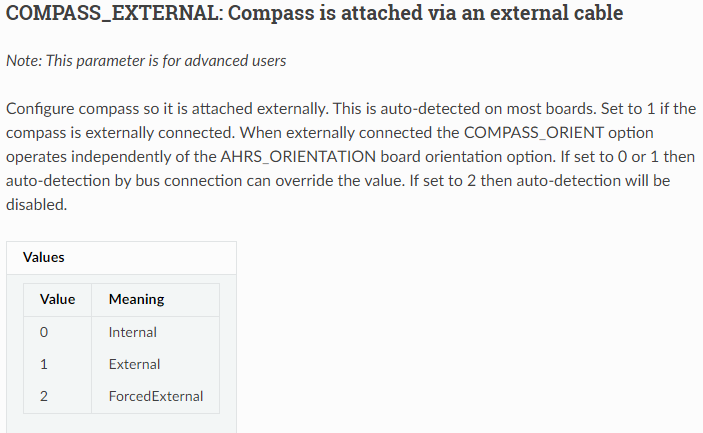
This is also an important parameter:
And this one:
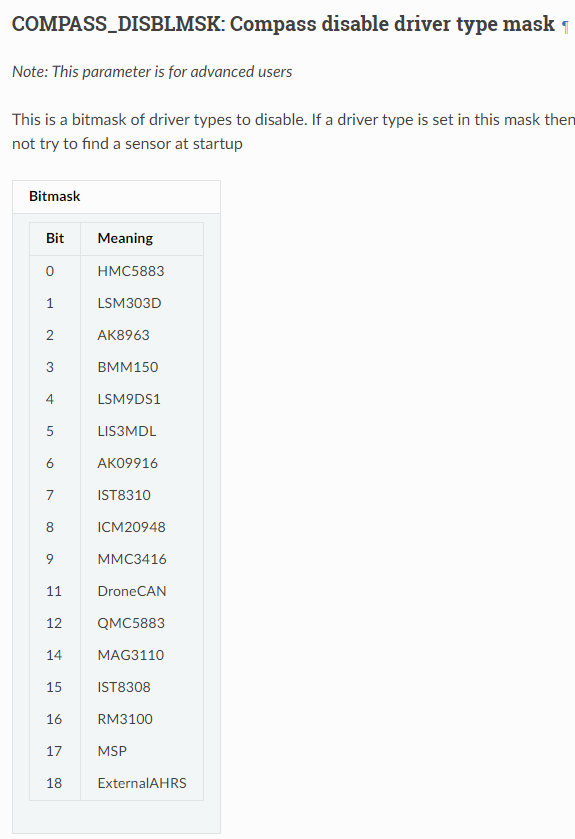
Make sure it is not ticked off.
Ok thank you.
I just bought a Pixhawk 6C changed the parameters as per your post
still not recognised the RM3100 also not recognised on the Pixhawk 4
I bought the compass from Unmanned Tech, they just advised me to plug it into the Can Bus but that didn’t work either.
What RM3100 you have is it with I2C, SPI or CAN interface. The one above linked by @ThomasMO has no CAN interface. If your dealer said to plug it to the CAN it must be different to that one linked.
Please give more detailed information
I use the I2C port. Plug it in and it will appear in the compass section
It is only for I2C port not CAN. Maybe you can try to enable compass 1 as external and compass 2 as external and compass 3 external. If only one compass is enabled it will only find the internal one.
Exactly what did you buy? I see a couple of CAN based RM3100 modules on the website that you reference. It’s important to be specific. CAN sensors sometimes require a little extra setup.
He says its a can based type 4 pin plug, but it doesn’t work, I feel sure it a configuration issue, but my best guess.
I have made progress but I am constantly getting flight mode change failed and EKF variance. Been reading a lot about it but no solution so far. If I can cure those two items I think I can get it to work with the exiting M10 compass for now and wait to see what the support guy says.
Many Thanks.

Again, incomplete information, but fortunately I recognize the logo in the picture. What you have is a Holybro DroneCAN RM3100 module.
The connector is a 4 pin JST-GH connector that fits any number of ports on modern autopilots including I2C, CAN, SPI, and various others that need a 4 pin connection. You can’t just plug it into any old port with 4 pins and expect results. In this case, CAN is correct.
Plug it into the port labeled CAN1.
Set:
CAN_D1_DRIVER: 1
CAN_P1_DRIVER: 1
Leave the rest of the CAN parameters at defaults. Reboot, and hopefully you see something new in the compass setup page.
Sorry! I changed the parameters, now it says unrecognisable usb and I cant connect
If there are two COM ports associated with your autopilot, try the other one.
All ok now compass shows you made my day thank you so much!
1 Like
Lessons learned all around. You really must be as detailed as you can with the hardware in use and errors presented.
The most common RM3100 standalone boards use I2C for communication. However, some are CAN peripherals. We need to know what we are dealing with before we can…well, deal with it ![]()
2 Likes
since the changes no start up tone, is that an issue or can I ignore it?
I am still suffering with Flight Mode Change Failed I have a RTK GPS FIX
happens when switching to auto or rtl
I get an error EKF Variance. I have had this issue on Pixhawk 1 Pixhawk 4 and now on Pixhawk 6c. Tried with 3 different compass/gps
How do I determine what is the cause?
Can I disable EKF Variance?
00000025.BIN