Hello guys. I am a newbie in the copter world. I used to use APM in planes and I hope that you can help me do it right in copters. I’m trying to tune my copter. I’ve tried a dozen different PID settings (and copter fly not bad but always is a little bit twitchy (even in stabilize without input)). Also, I can’t deal with these problems.
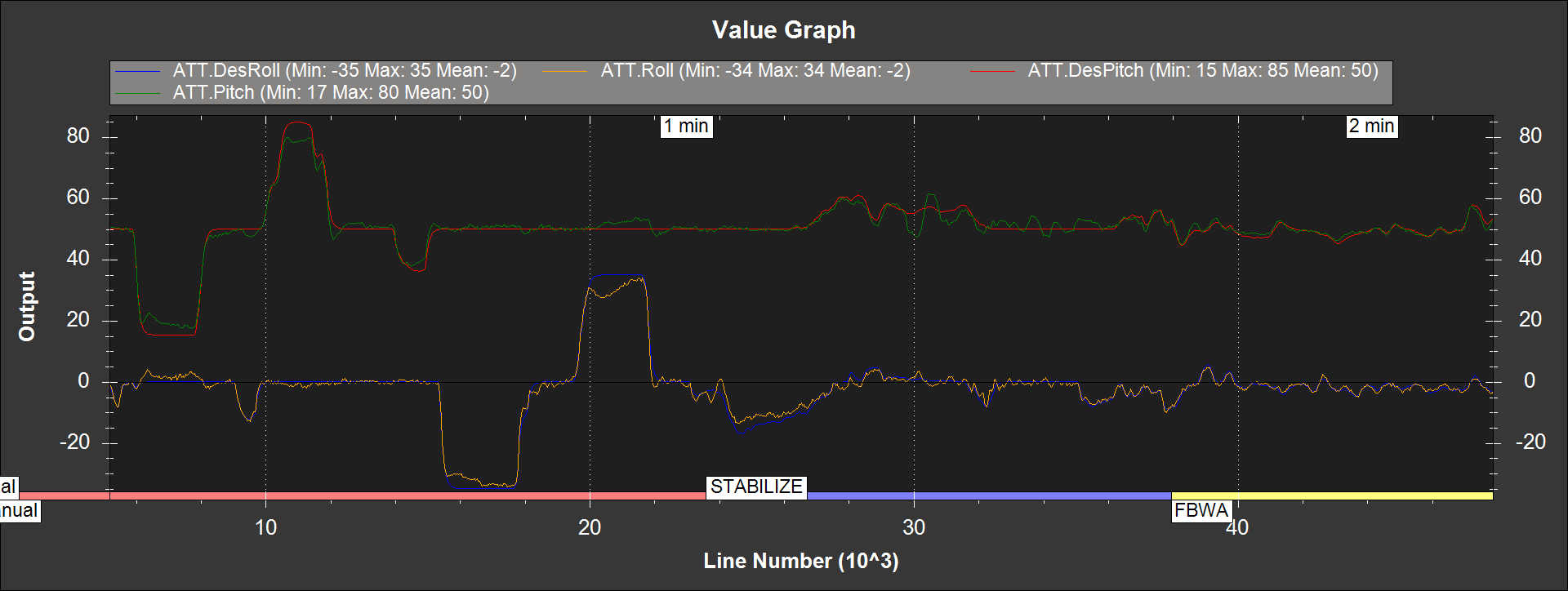
- ATT.Roll/Pitch does not reach ATT.DesRoll/Pitch after large, rapid changes of Des.xxx.
- Another thing is that I can not suppress those small vibrations that appear all the time and I’m afraid that they may be harmful to the motors.
When I approach the solution to the first problem, the second one is getting worse and vice versa.
Before attempting manual tuning, I tried to use the Autotune function, but I was not happy with the results.
If someone can help me I really appreciate that.
Log: https://www.dropbox.com/s/04bh20u3beq70gn/00000062%2015%2019%20007.BIN?dl=0