hi all fellow people
I’m using daily arducopter with different release and since few weeks I’ve a strange behavior. It appends on different releases (3.5.3/3.6.3/3.6.4 and others) so makes me think of a miss configuration
heres what happends :
on octoquad copter fly perfectly on althold
mag cal is perfect in default and in strict also
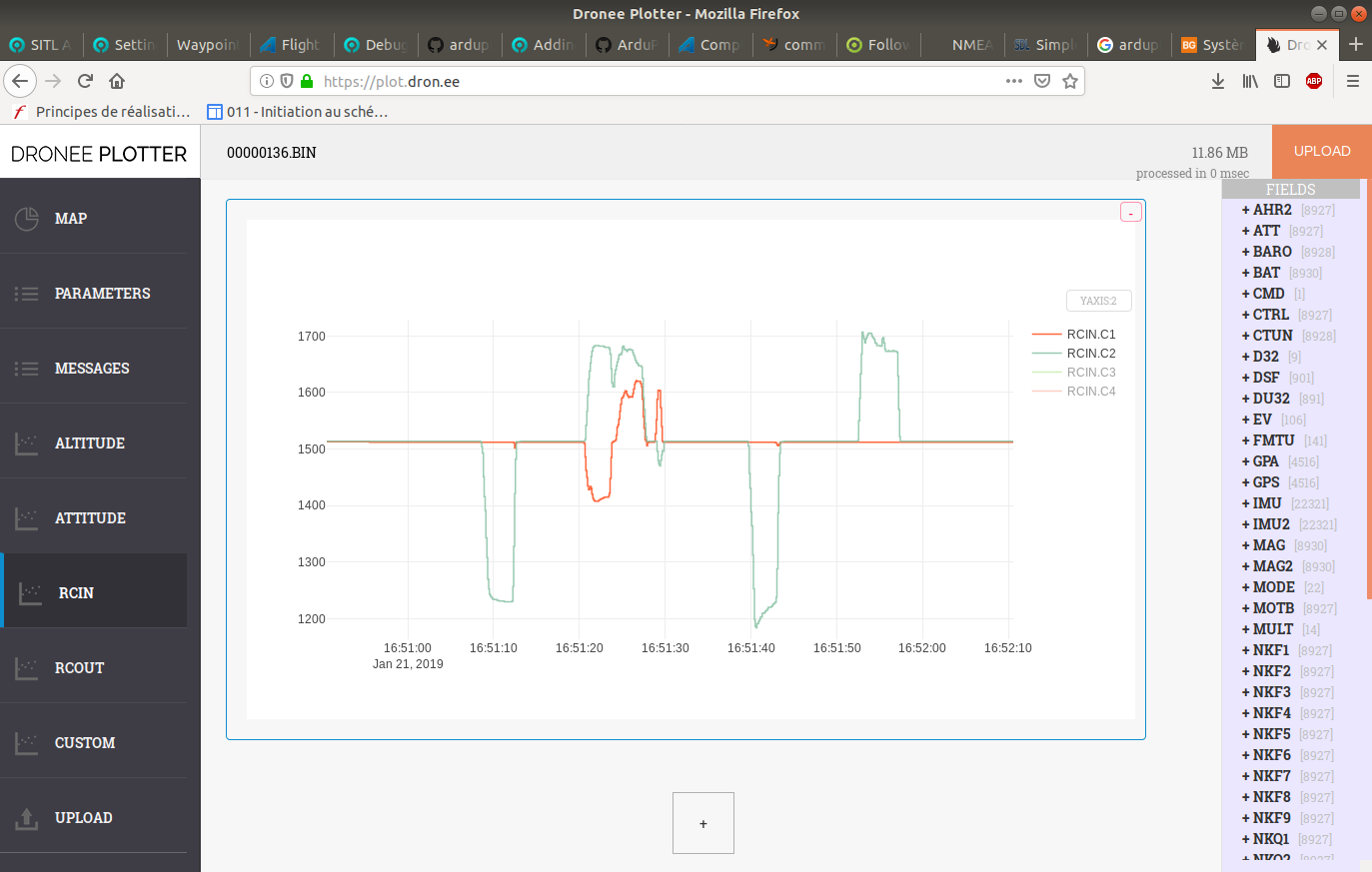
when switching in loiter mode and pitching forward it’s pitching ok but it has also a roll right movement
when pitching backward it has a roll left movement
as shown on theses scree shots rc inputs
yaw stays calm and sats is up to 18 with 0.5 HDOP
I’m letting my log file for those are realy intrested I’ve not find anything similar in forums (I’ve probably badly searched ) https://drive.google.com/open?id=1I_F_gMHJwG5qkwyWcGHTNTlKU2qmoiCS
drones I’m working on are quite heavy but I reproduced this on different ones and I’checked mag corruptions by motor and It’s not involved
I’m running out of idea for correcting this.
thanks for any help, any idea … any anything
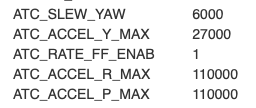
ATC_ACCEL (Y, R, P) could be set at Slow or VerySlow.
Try and feel…
Pitch and Roll control:
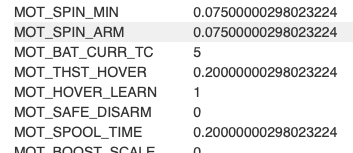
You can set MOT_SPIN_MIN at 0.09 (larger than MOT_SPIN_ARM)
As your MOT_THST_HOVER value is quite low (to be confirmed? MOTOR_HOVER_LEARN is set to 1 - learning but not saving), delta allowed for control is quite short.
tank’s so much for the help marc
motors are effectively larges (TMotor U8Lite 150KV)
and you’re right ATC_ACCEL_*_MAX are too high I will change this
MOT_SPIN_ARM must be set higher sorry for that I think it’s just test stuff laying on
theses drones are heavy lifter and change of payload most of time that’s why MOT_THST_HOVER is set to low value because it’s hovering with 0.2/0.3 without payload and MOTOR_HOVER_LEARN keep to 1 to adjust when changing payload (including during flight) what I dont understand is why keeping hover thrust learning would reduce control “pwm space” and what I don’t understand too is why if it’s a control capability issue, des-roll is moving when pitching forward
another thing let me in the fog is that it fly perfectly in ALT_HOLD mode
but anyway I will play with theses params and see what it does
There is no relation between MOTOR_HOVER_LEARN and pitch-roll problem. I was just wondering the why for this setting (I use 2 or 0 but my payload is constant), so your choice with variable load is good.
It looks to me like a problem a few had and myself too. When i pitch forward the uav goes to one side a little and the opposite when coming back.
For me it was a compass problem, i did calibration and got better but once in a while it happens again, i guess it is environmental magnetic fields that slightly offset mag and cause the prob.
I was not able to completely remove the problem and have it perform straight on every flight, yet.
Easy way to check is try to go forward and backward in stabilize, if it doesn’0t do it and does it only in flight modes that involve compass navigation than it is same prob i am/was having.
in fact in position mode it dont use compas and gps when moving just when hovering
when I’m disabling the compas in flight it works perfect but when disarm it can’t re-arm
in position_hold it works perfect also so it looks related to mag but when I check mag on earth it’s well calibrated
in loiter if i goes forward it goes a bit on it side but trace on MP for exemple is parallel to the heading it means that it think’s going straight even if it’s not
in alt hol stabilised or position mod all is ok
it realy looks related of mag but I don so mutch calibration and try so mutch different kind of external mag that I can count all