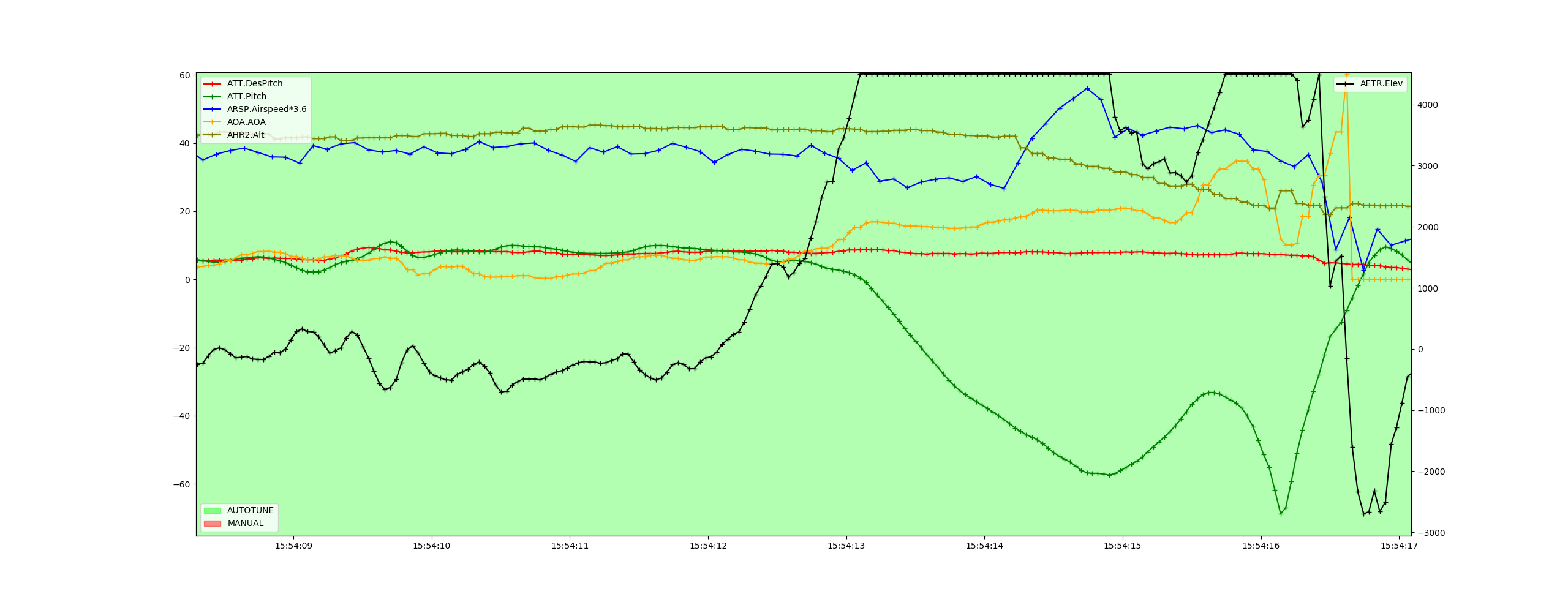
had a crash and had to bushwhack an hour to get to the crash site. FPV feed shows a typical accelerated stall and near-flat spin during turn to final. Entry into stall was probably a combination of low airspeed, yaw effect, wind change, and poor aerodynamics of my battered foam trainer, but above all i found that FBWA demanded max elevator either at incipient stall or shortly afterwards as a result of divergence of DesPitch and actual pitch. I understand an attitude demand law like FBWA has no inherent speed stability and is dangerous to fly without some sort of AOA/airspeed indication or protection, but in this case I am dismayed to find that although DesRoll kept shrinking with decreasing airspeed, this abrupt max elevator input was not checked by any stall protection mechanism. I had a pitot tube being calibrated and Arsp use=0.

- so, why not implement something with a bit more authority than the Stab Pitch down thing? I’m thinking about a pitch rate bias as an artificial stick pusher which you can overpower with stick input, or a soft pitch limiter based on synthesized AOA. I mean if synthesized airspeed and AOA are unreliable, maybe an optional stall protection feature can be enabled for those who has a calibrated external airspeed sensor?
- how does the controller synthesize AOA and Airspeed? I know some commercial airplanes have sophisticated airspeed synthesis, but these cannot be done with GPS and INS only. The synthesis must be dependent on wind changes in a circuit and therefore not very sensitive to gusty wind changes? can someone point me to a document that outlines the formulae?
- there is a bewildering list of control laws in ardupilot. It’s interesting to compare what’s available here and what’s implemented on commercial airplanes. FBWA and B will both fly you into a stall if you hold pitch and fumble on throttle. Acro is a rate law but also with attitude hold, which means the same lack of speed stability. A pure rate augmentation like some large airplanes can provide better natural speed awareness and shouldn’t be much more difficult to fly. the best compromise seems to be a maneuver demand law that can provide both excellent handling quality as well as (maybe artificial if airplane not very stable) speed stability.
- before I get my hands on a good analogue FPV with OSD, i’m going to fly Training or Manual instead.
i’m new to this thing and curious to see what others have experienced in terms of stalls. any thoughts or help is appreciated.