copter 4.1, cube orange, RFD900x txmod on a tx16s running edgetx.
When I turn off the remote, RC6 goes to high. RC6 is set to arm/disarm mode, so if radio failsafes, the drone arms… which is a bit worrying haha.
Any pointers on “the right way” of adressing this? I just want to limit any complications I could create by inverting my channels or settings limits etc.
Connect using your favorite serial terminal at 57600 8N1 and an RS232 converter connected to the aircraft radio.
Type “+++” to enter config mode (do not hit enter). Should return “OK”
Ensure all other radios are turned off.
Type “AT&R\r\n” to set the ppm failsafe on the radio . Should return “OK”
Type “AT&W\r\n” to save the configuration to EEPROM. Should return “OK”
Type “ATZ\r\n” to reboot the device.
Depending on how you set up your TXMOD radios, the failsafe condition will be whatever status you have the radio. It’s an old school way of setting up radio failsafes that will send a predetermined set of commands to the FC. The idea is that you setup your radio failsafe with the radio in the RTL configuration to get you home. Works fine. I guess.
The problem is the FC never actually knows you are in failsafe, it only sees RTL and whatever other switch combinations you have setup. Including your arming switch.
It also means that if your change the switch configuration to “dis-armed” then the copter will disarm. So you might want to leave that. I’ve heard conflicting answers to wether or not a quad will disarm in flight like that. I’ve never felt the want to test. I know when I hit the disarm switch close to the ground things stop in a hurry.
that is a very bad idea to use a mode selection rather than RC failsafe, as it will override other failsafes because it thinks the user is overriding it. like if battery failsafe kicks in and tries to land the machine out of range, RTL selection failsafe would override it and try and make it fly back causing it to fall out of the sky.
Thanks guys, this is exactly the type of discussion I wanted to create. I will follow Allisters approach and test everything on the ground before I go further and confirm the trigger is indeed an RC failsafe.
If using PPM then you need to use the “Set PPM Failsafe” button in the RFD Tools, ensure you have all channels how you expect them to remain in a failsafe condition. For example throttle to mid-position, flight mode to RTL.
The best way is to change to using SBUS and the RFD radios will respect the settings you have in the radio, such as “no pulses” for receiver failsafe. This way you dont need to use the Set PPM Failsafe method.
@xfacta and @amilcarlucas I have tried at first to use SBUS because its so much better on the sticks, be to no avail. I don’t remember exactly what didnt work, but I remember I was getting min/max values jitter in the RC tab in mission planner. I could’nt get the sbus output working steadily.
I will try again and link a video to show what I experience.
I want to follow the steps to the letter, but i did not see specifics for radio to txmod interface (going to model options and selecting SBUS out for example, which I did).
Here’s the video showing the problem I experience: rfd900 on cube orange, txmod v2 on tx16s. arducopter 4.1.5 - YouTube
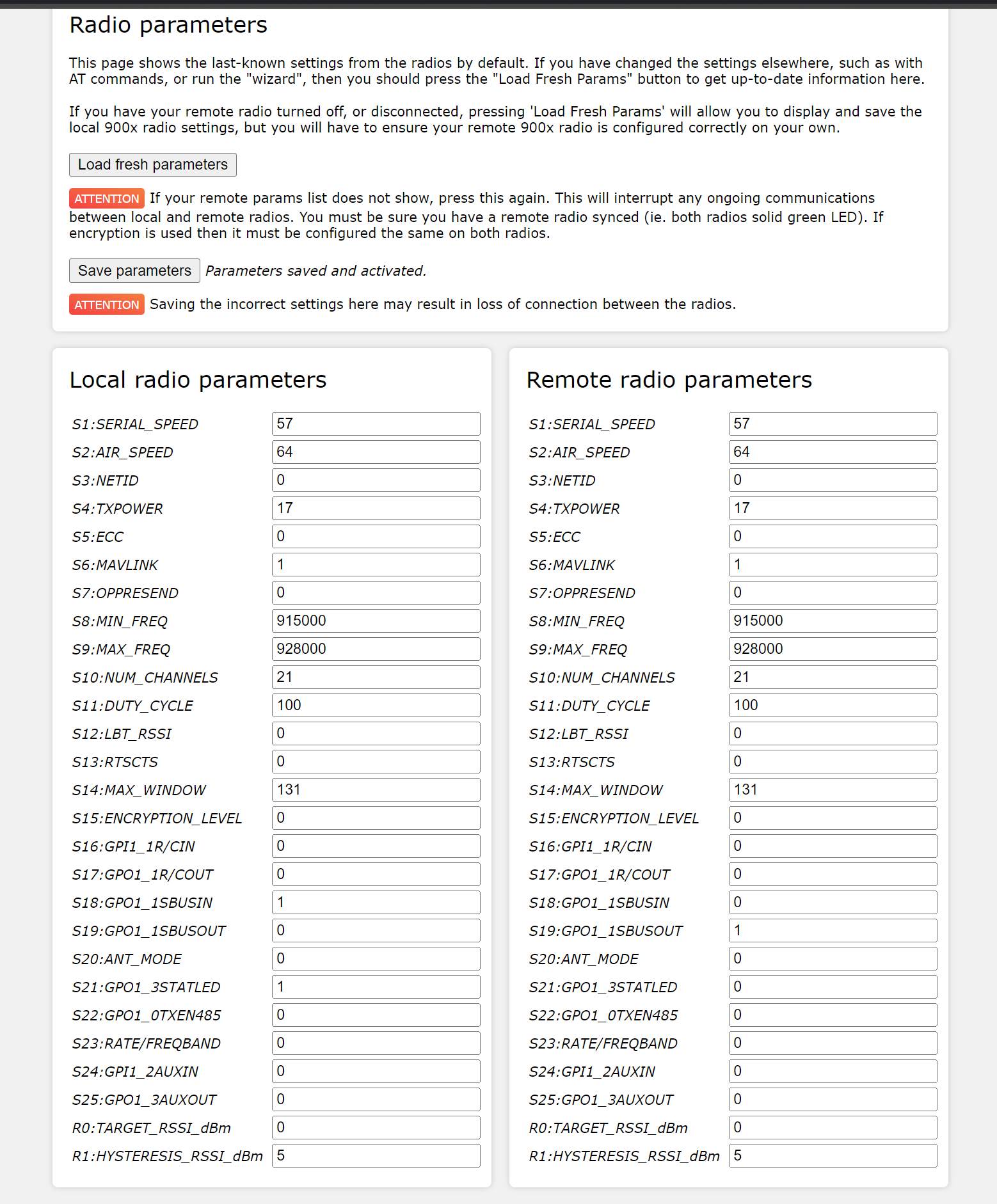
Also, both ground (local, txmod) and air (remote, rfd900) radio settings: