Hi all, Going to set up ArduCopter for the first time and wondering if i can reverse the direction of all motors.I will be using an X frame with 10" between motor to motor.
According to the normal quad X setup,front left motor spins CW and front right spins CCW.But it brings debris to the camera lens.Can we switch the direction of all motors?Please suggest.Thanks
Oh then its gonna be out of scope for me.Not familiar with custom mixer at all but will look into.I thought there was some simple parameter change.
Actually it helps when you fly a quad (low profile carbon fiber X frame where bottom of the motors almost touches the ground.) on a grass.Props spinning in default direction throws fine grass clippings and debris onto the camera lens.
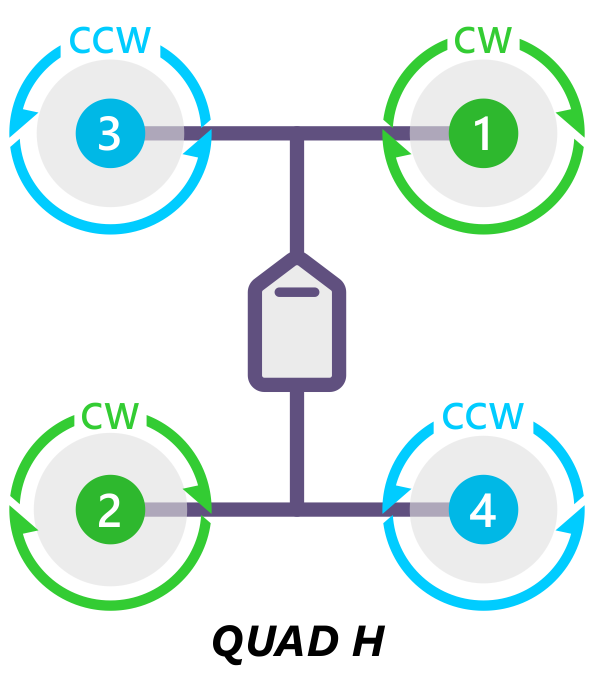
Your linked doc url cleared all of my confusions that i had about H and X frames.Thanks a lot!!
I should have read the documents with more attention:).
Yes i will go with H frame.I had an wrong impression that choosing H instead of X on a actual X frame would effect its handling.But that note cleared it up.