Unfortunately, the weather is too windy and rainy to carry out VTOL flights today. Therefore i use the time on ground to summarize our settings:
FC is a Pixhawk with 1 MB, firmware currently Arduplane 4.1.0 dev from October 06 2019. Like a standard tri-tilt, Q_FRAME_CLASS is set to 7. But Q_FRAME_TYPE needs to be changed from 1 to 6 for MOTOR_FRAME_TYPE_PLUSREV.
MOTOR 1 is the right rear motor, MOTOR 2 is the left rear motor and MOTOR 4 is the front motor. Since only the front motor (motor 4) is tiltable (binary bitmask 0001 = decimal 8 ), set Q_TILT_MASK 8.
Our Pixhawk connections:
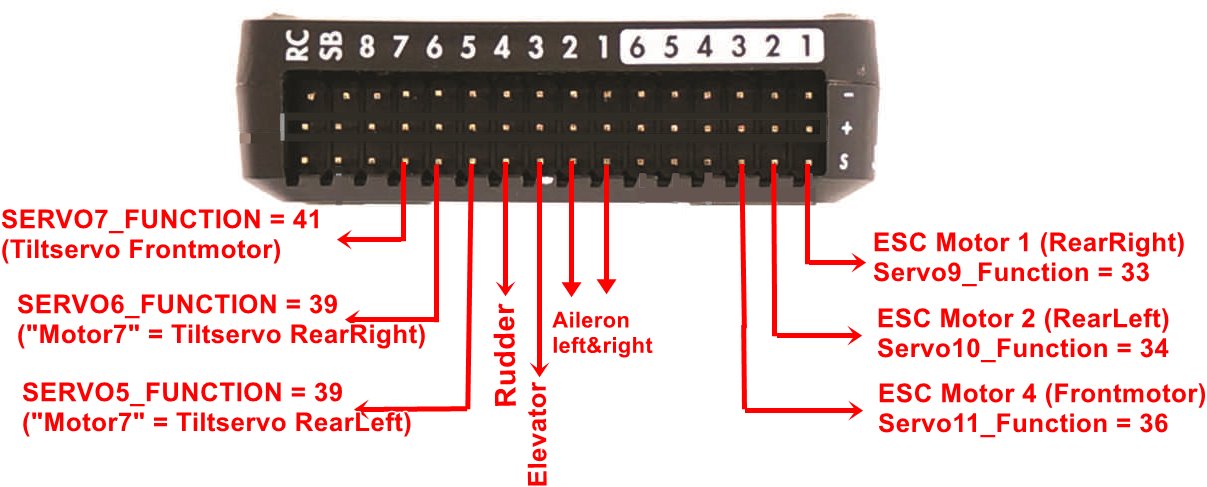
The BLHELI32-ESCs have been intentionally connected to outputs 9,10,11 since at DShot is not possible at outputs 1-8.
Q_M_PWM_TYPE,4 (DShot150). (No calibration required, motor cables are directly soldered without plugs, which saves weight. If necessary, you switch the motor direction via blhelisuite passthrough).
Q_TILT_TYPE,0 means continous yaw-servo as yaw-control. Contrary to our posting on May 2, we unfortunately had to give up the idea of driving the rear tiltservos as vectored yaw. Hovering at QSTABILIZE/QHOVER works well with vectored yaw, but unfortunately after forward transition is completed, the PWM decreases down to the “virtual” PWM (e.g. 700 µs - see Reverse Tricopter-VTOL Plane ) and would damage the tilt servos while in plane flight mode.
So the rear Tiltservos are controlled as if they are a yaw servo of a tricopter: Q_TILT_TYPE = 0, Servo5_Function and Servo6_Function is set to 39
Other parameters that depend on frontmotor-power and stall speed are
ARSPD_FBW_MIN,10
Q_TILT_MAX,75
Q_TILT_RATE_DN,10
Q_TILT_RATE_UP,80
Regards Rolf