For the first hover-tests we have vectored yaw enabled - with a little trick:
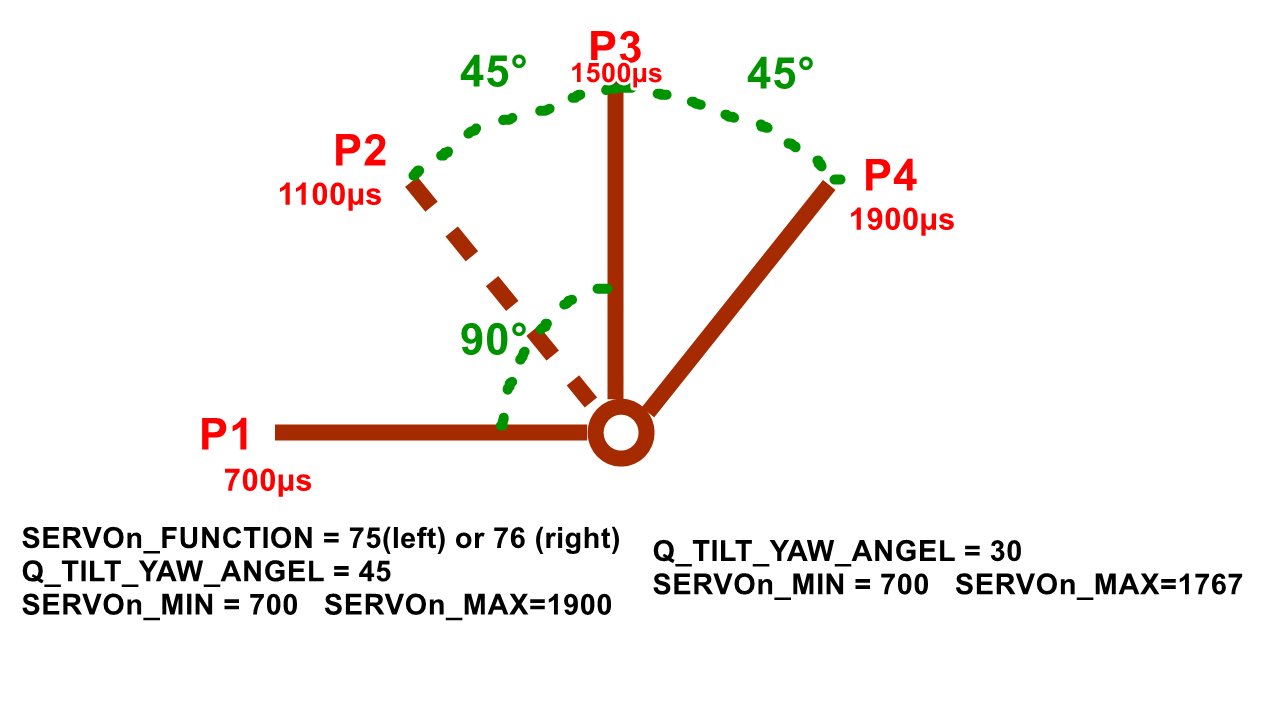
Our rear servo mechanics tilts the motors at PWM values between 1100µs and 1900µs by +/- 45°. The rear servos of course can not tilt the engine completely forward, but the software does not know. You simply have to set SERVOn_MIN down to a suitable “virtual” value, as in the following example:
On the bench it works (QSTABILIZE):
Unfortunately, in one of the tests, a mechanical failure caused the front servo to break. Better on the ground than later in the air. It will take a few days until a new servo is installed.