Hi!
I have a stragne issue with H-Quad in Loiter mode.
Copter-3.6.9 on Pix FMUv2 HKPilot32, PX4Flow, Garmin lidar v3.
Twice i observe strange reaction lag on pilot input on Ptich channel.
It happend in diffrenet places, in different enviroment, once with GPS lock, and once indoor with OpticFlow stabilization.
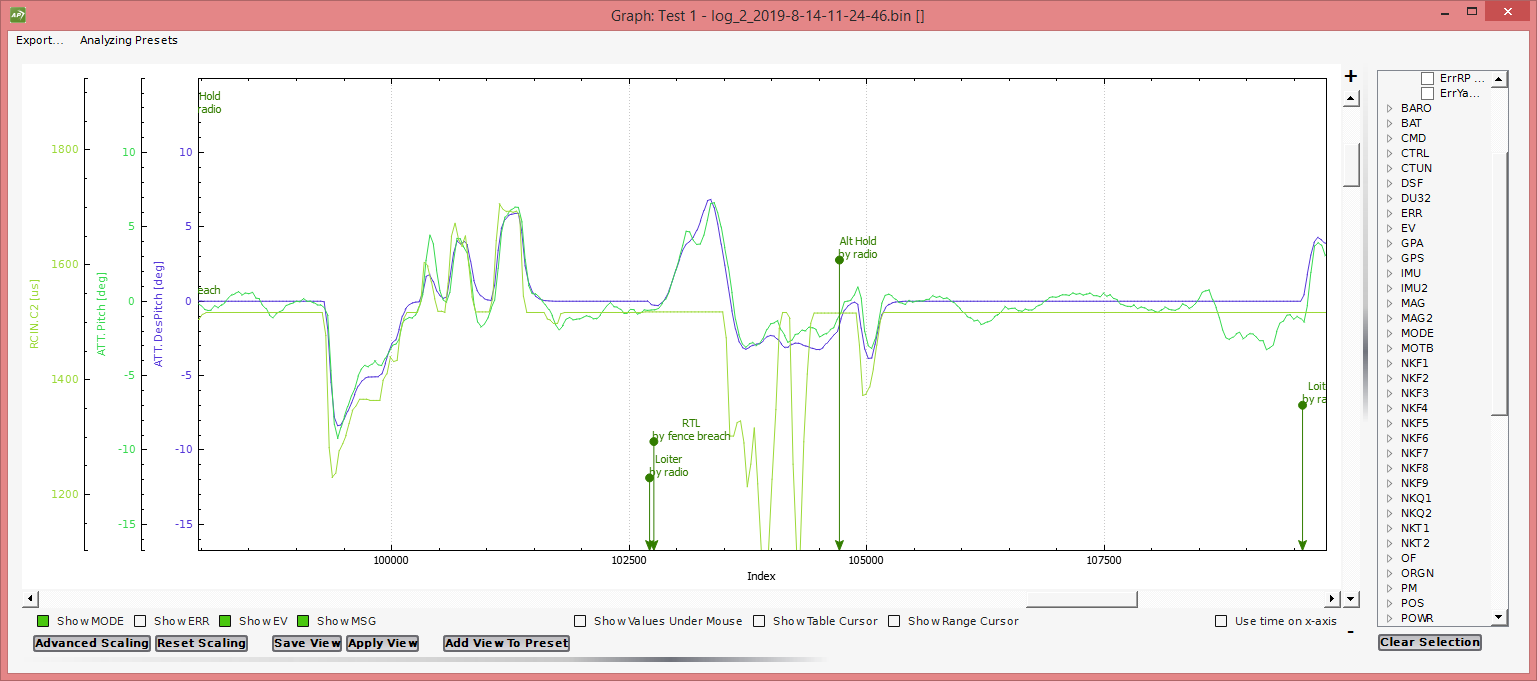
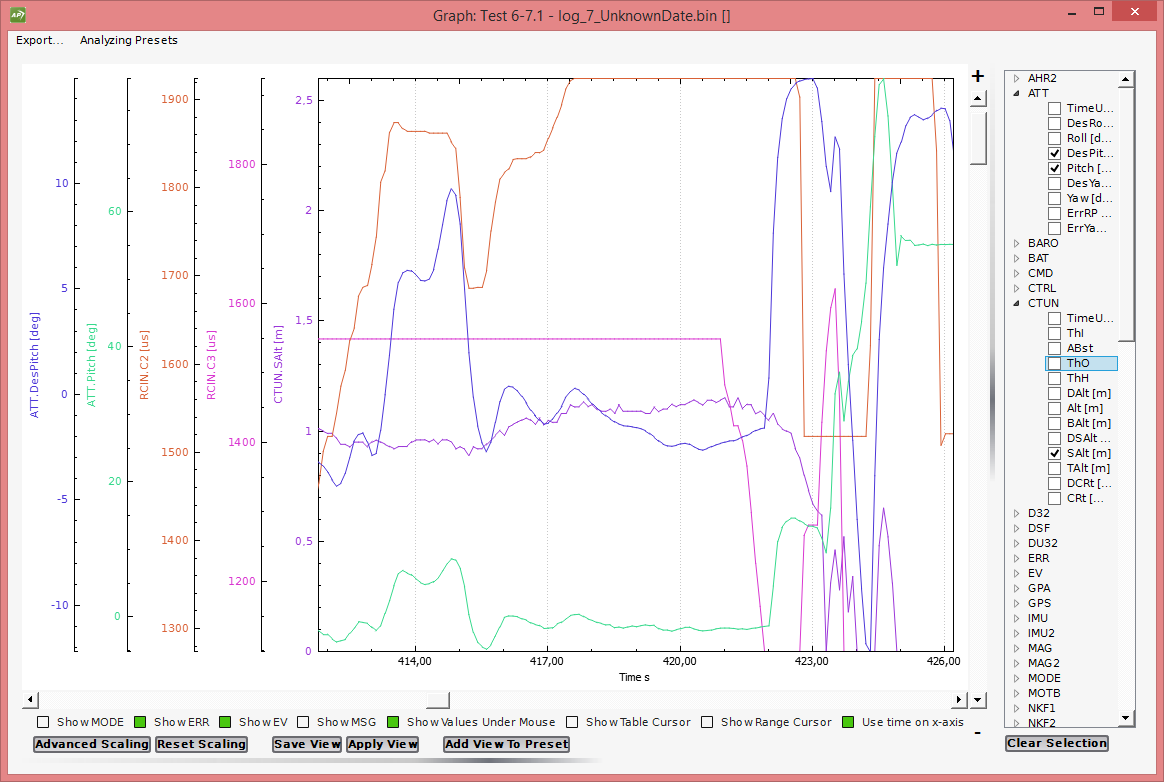
Please look on the graphs.
In both cases there are some input from pilot and in one moment no reaction (DesirePitch and Pitch not change).
In first case i switch to AltHold to regain control (and it’s visible on graph that i get it), in second quad was too low with low throttle and start response to input when almost touched down, so rolled back.
Plase any idea what it was.
Kind regards, Max.