After many test with our rigid frame and 4 HOBBYWING CAN x11plus, we get perfect UAV at 40kg TOW.
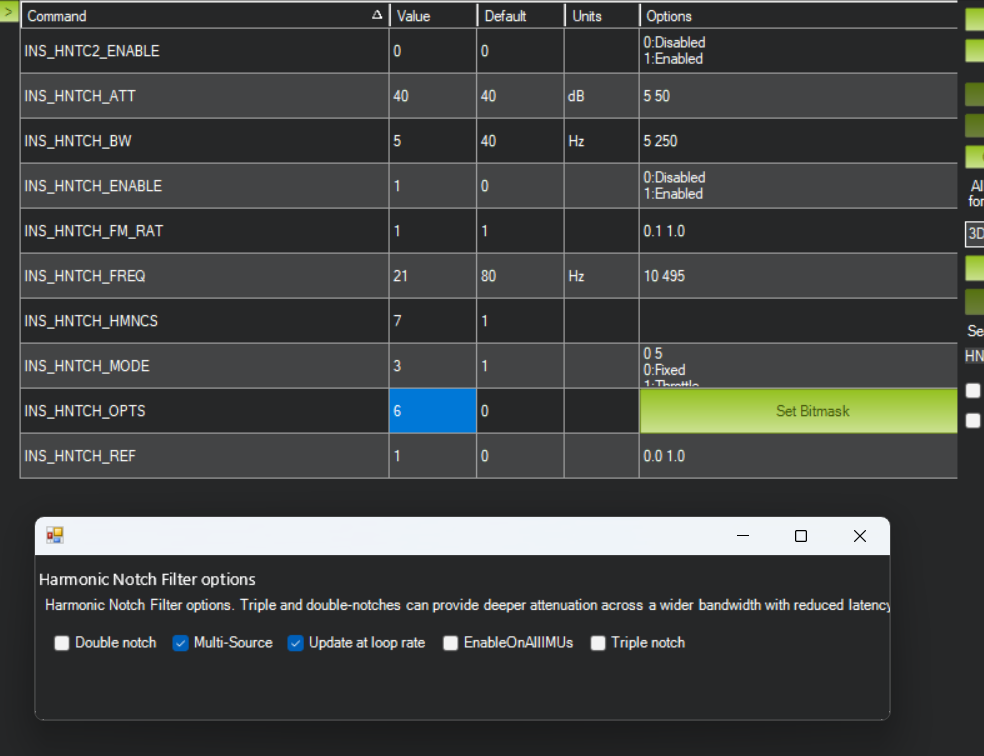
Setting dynammic HNTCH for each motor on harmonic 1 2 and 3.
Flying perfect in LOITER ALTOLD AUTO, auto take off, all perfect.
To get this result AP was fixed solid on the frame.
Before we tested many antivibration system, and each time we wanted to tune the UAV getting up the rate D terms we encoutered resonance phenomen with motors arms at 1/4 of the gain needed to stabilise correctly the UAV.
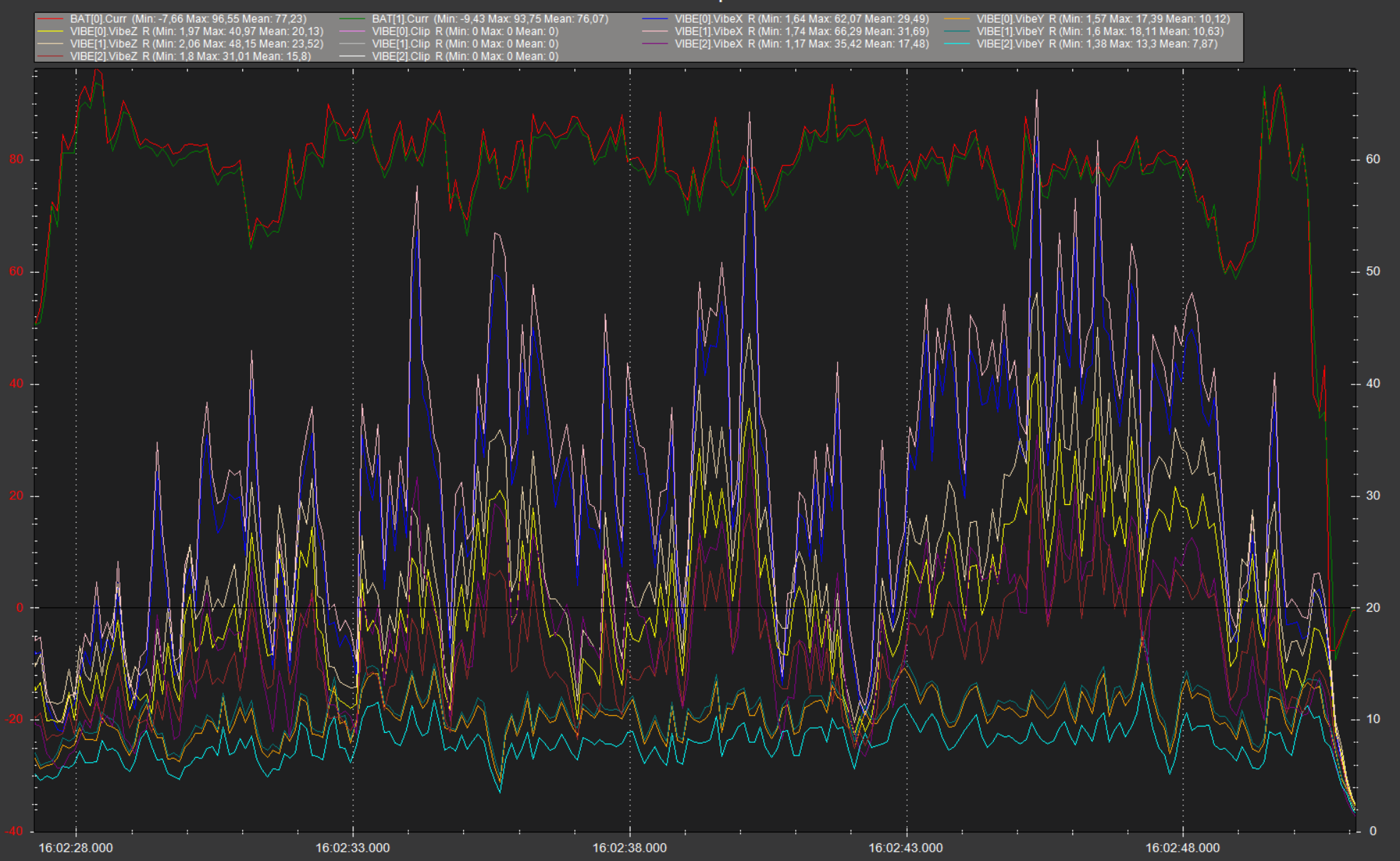
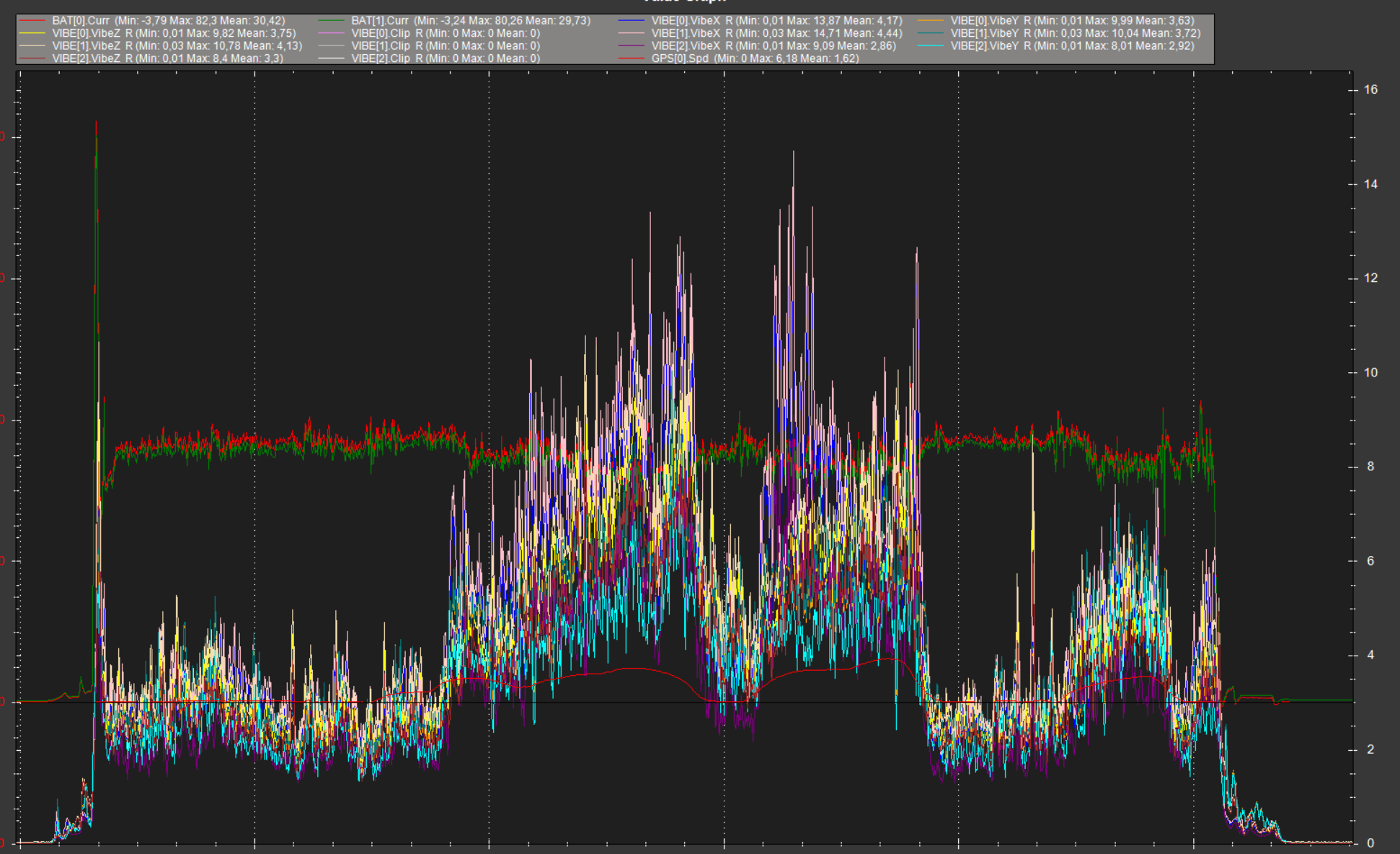
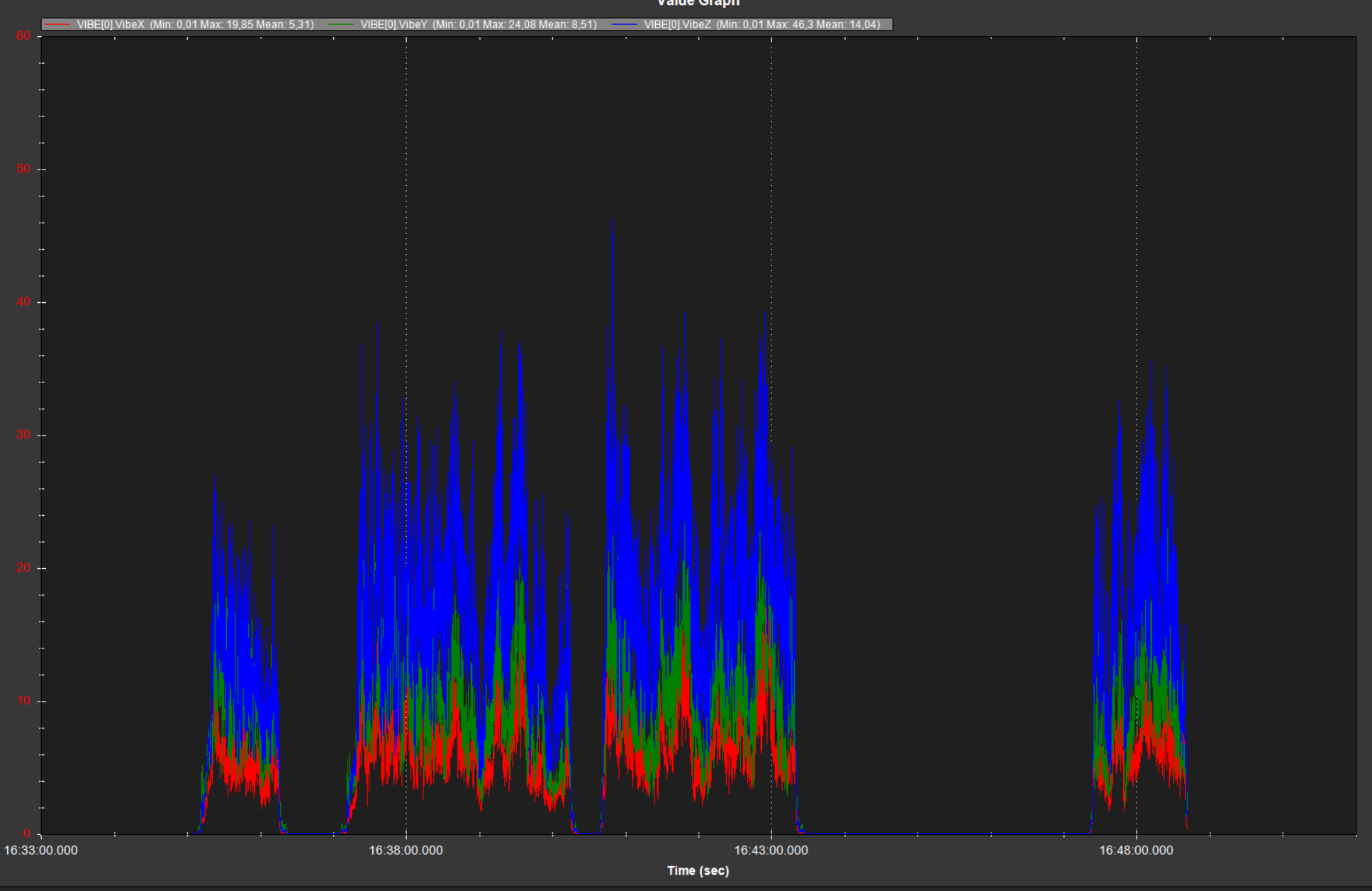
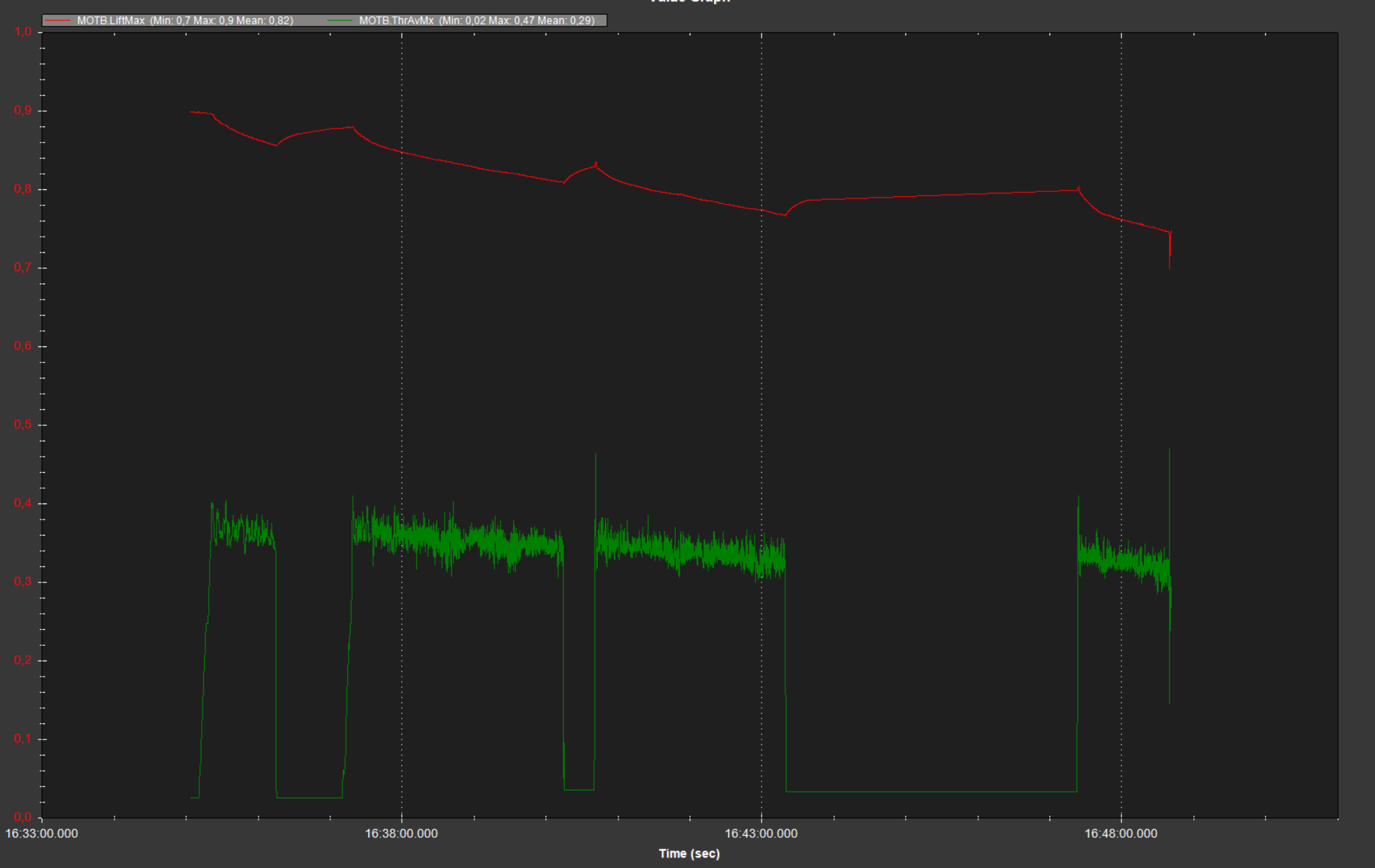
So AP fixed hard on frame UAV run perfectly smotth even with the strong wind of last days (15m/s), with vibration always around 10, and getting just below 30 in dynamic turns flight.
Today we test it with 30kg payload, so 70kg TOW, multirotor continue to fly very well, nothing noticeable appart the vibration levels…
static vibrations are just below 40 and as soon as we make translation vibration go over 50…but as I told you the UAV fly perfectly…
No clipping.
So we are in the case were antivibration mount cannot resolve our issue, and were normaly we must attenuate the vibration levels.
No, but there has been discussion about this on the forum before. The ICM-20649 has a max range of +/-30g but I’m not sure if it’s configured for that.
What is smoothly for you? Define it in terms of settling time and overshoot.
Many users (I still do not know if that includes you) never flown a properly tuned copter and are fully satisfied with an untuned copter with default parameters.
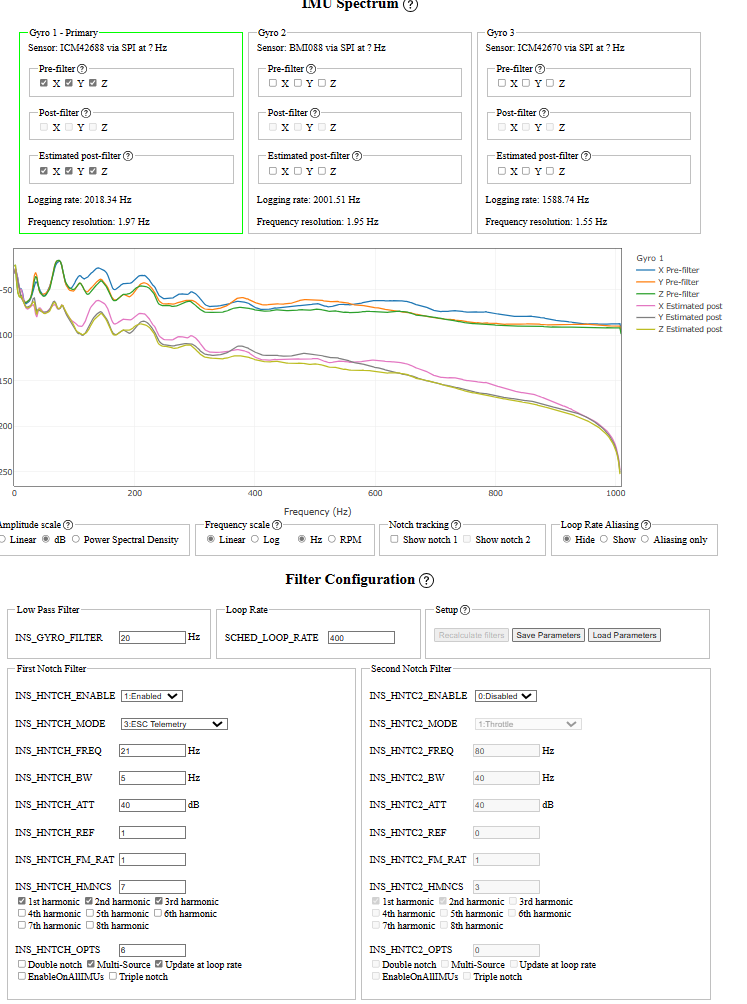
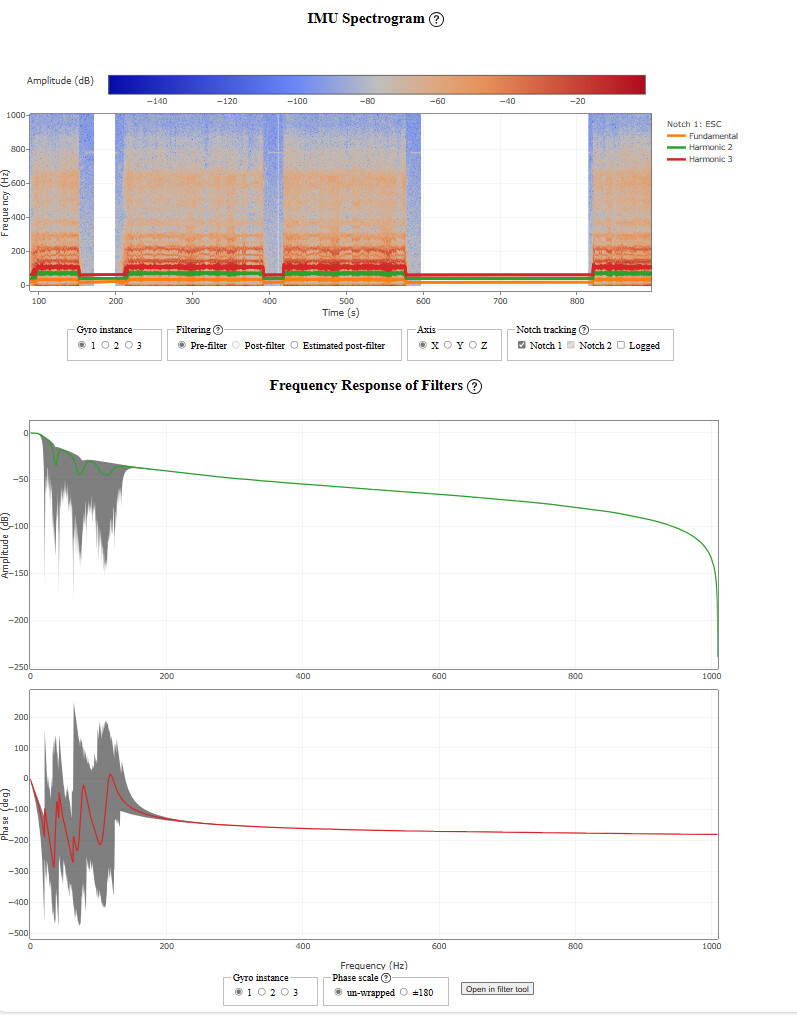
how have you tuned yours? Can you post the notch filter parameters and response (bode diagrams)?
I can do this but this is not going to help us to find solution.
Fact:
solid mounted ap good tune
Antivibration mounted cannot go over 1/4 of the good tune value, uav wooble and sluggish.
And when I want to put the good value 1/1 control loop induce 15hz vibration.
How to activate datalogging of the pwm motor output at full speed? To see this fenomen?
This vibration is due to the antivibration system that have resonance freq that match control loop response.
How to change the control loop response freq?
How to filter slow down response time?
You do not need to change any logging frequency. You need to use the notch filter webtool to look at the noise FFT, and use that information to correctly configure the notch filters.
No, it is not finished yet, You need to try different stiffness dampeners to find one that does work. You can also combine that with adding mass to the the FC.