Hi there,
We’ve encountered an issue with our onboard EKF whenever two GPS units are present.
While the Qplane is sat idle on the ground as soon as we see the “EKF active” message the vertical position varies up and down very periodically by several meters.
We had originally set the GPS blending mask to 7, but have also tested with “Use Best”, and with only 1 GPS connected, plots for all the configs are below (1. Blending, 2. Use Best, 3. Single GPS connected):


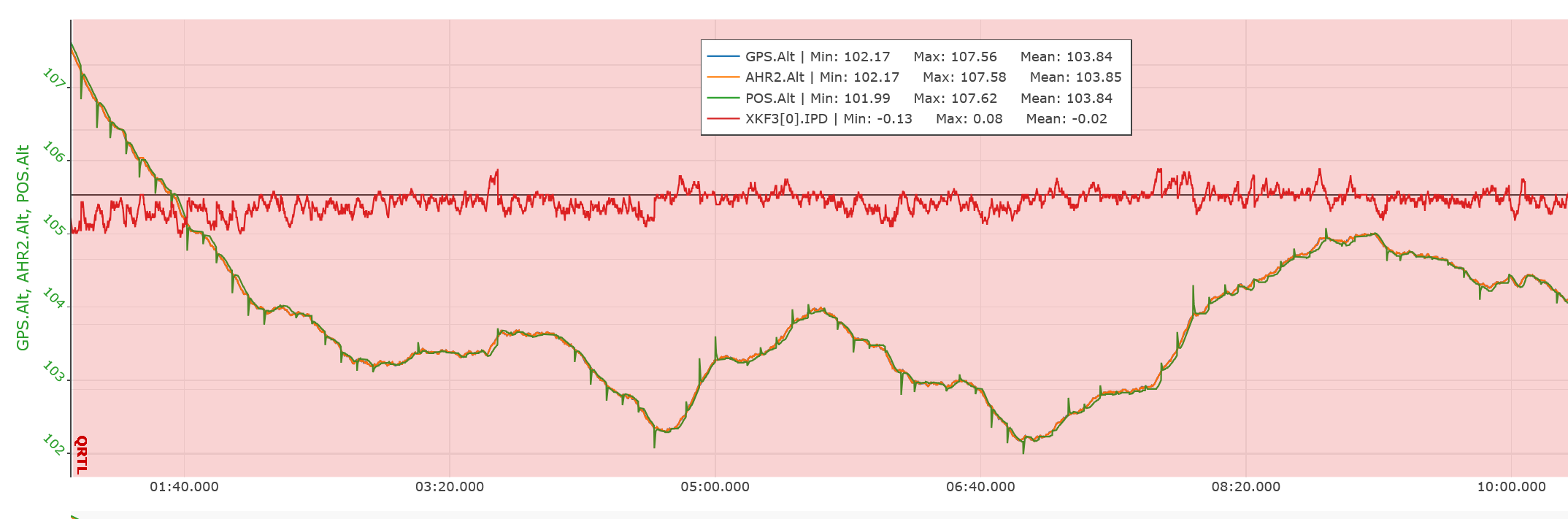
Even with only 1 GPS connected and a seemingly “healthy” IPD trace the periodic jump in vertical position is still there, just with a much smaller amplitude.
I’m at a loss for why we are getting these innovations up/down between the GPS traces when the aircraft is sat idle, and what causes the pattern to be so periodic/repetitive.
As the sat count increases the amplitude of the innovations does decrease, but the pattern always remains.
In my mind trying to tune this out by setting the EK3_POSD_NSE to a value of several meters could hurt position accuracy/performance, are there other measures we can take to remove this behaviour?
FC: Cube Orange+ (tested with 4.6.0b1 & 4.5.4)
GPS: 2x Matek M10-L4-3100 (CAN connection)
LiDAR: Benewake TF Mini Plus
Logs used for the images can be found here: Bad EKF logs - Google Drive