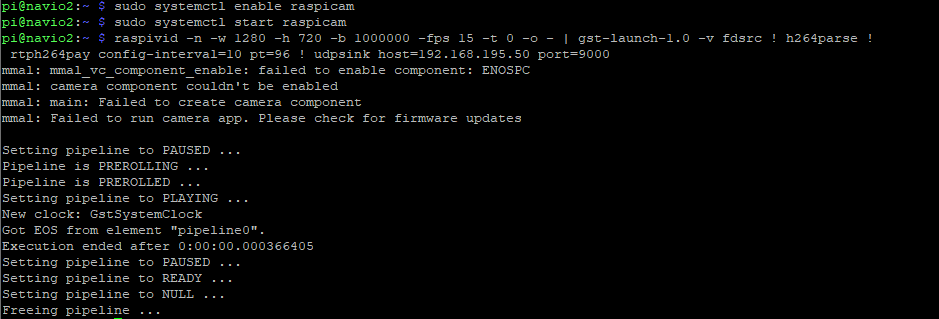
Hi, I am connecting the UAV to the ground station. I try streaming from UAV to GCS. But it is reporting an error. Can these two tasks be done in parallel? Thank you.
![]()
![]()
Oh, I fixed this problem. Thanks you.
Hello, did you control the drone UAV via Zerotier one yet? I’m not sure if you have a delay? But I have a lot of influence on this, so the control is quite difficult.
Thank you for comment.
I never control the UAV over internet with joystick. I use internet only for GC Guided mode/video transmission.
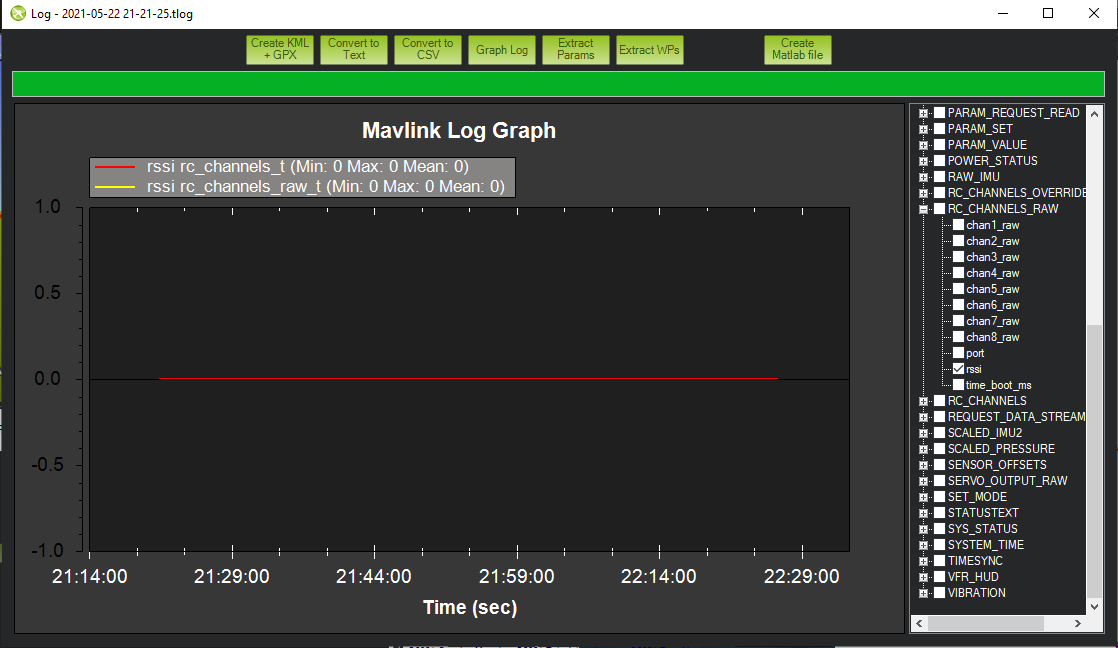
Hello, I am currently learning about the RSSI parameter in the log file mission planner. However I noticed it always returns 0. Is the zerotier remote control method able to measure this parameter? I am using arducopter 3.6 and mission planner 1.3.74 . I want to consider the stability of this control method. Please give me advice. Thank you.
The RSSI parameter is the RC signal strength, as measured by the RC receiver. Not all receivers are capable of measuring this. It is unrelated to Zerotier.
Hi, as far as I know, it is only possible to check the rate of packet loss through “link stat”. However, I have not found the relationship of the parameters in this “link stat” table, how it affects the link quality between UAV and GCS. Sometimes the parameter “Telemetry connection link quality” shows 10%, but I can still control the UAV. All parameters are quite vague, so I can’t analyze and draw conclusions about the channel.
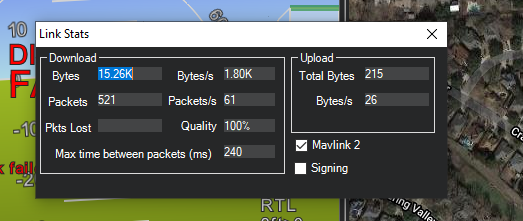
There’s limited ability to measure the link quality. What Mission Planner is measuring is the %dropped packets in the UAV->GCS direction over the last N seconds (N=5, I think).
On the GCS->UAV side, Mission Planner will (for some commands) continue sending the command until it is acknowledged by the UAV. That way, even if there is some packet loss, the command will eventually get through.
If you want to measure the Zerotier link reliability. I’d suggest some sort of network testing tool - maybe something based on ping.
I understand this architecture, but I fail to understand the use of a VPN. Can you explain why we need a VPN?
Consider take a look at this project.
With ZeroTier you can treat the entire planet like one data center.
Hi giliardi, thanks for valuable input concerning udp connection to gcs. Works fine! But as soon I add a second gcs with TELEM3 =“-A udp: ip-of-2nd-gcs:14550” it doesn’t connect anymore. Some ideas?