Hello !
I read a lot of thread about relation between RCOUT and THO.
From what i have understood we cut the extreme value of the range 1000-2000, and apply the correction with the MOT_THST_EXPO parameter
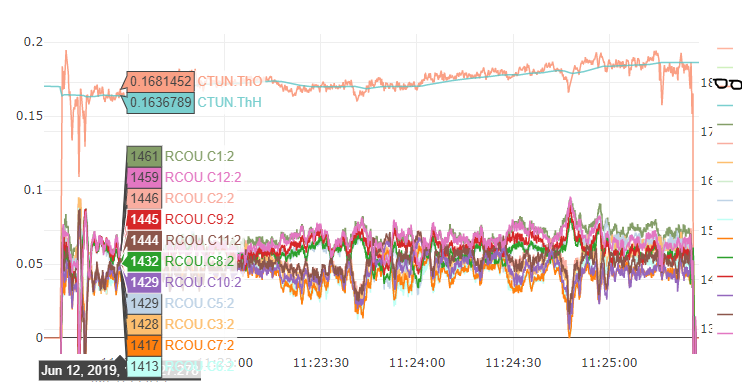
The thing i don´t understand is that my ThH is 0.18 ( ThO during hover, right ?) and my PWM value is around 1450 for each motor ( see graph).
The curves from the scaling don´t seem to be able to explain such figures !
I should get (1450-1150)/(1950) = 0.375, with the scaling I should be close to ThO=0.31.
Or if I apply
MOT_THST_HOVER defines the hover throttle using the formulae below.
Hover throttle pwm = minimum throttle pwm + (maximum throttle pwm-minimum throttle pwm) * MOT_THST_HOVER
The RCOUT for hovering should be 1278 = 1150 + 0.16*(1950-1150) = MinThH(Max-Min)
What else is happening there that I´m missing ?
I would like to but MOT_THST_EXPO =0 to check if it´s linear but I´m affraid this will make it hard to control.
My current values :
- MOT_SPIN_MAX =0.95
- MOT_SPIN_MIN =0.15
- MOT_THST_EXPO =0.65
- MOT_THST_HOVER = 0.170
I want to correct them once i got my test bench working correctly and tabulate for my motors/prop associations ![]() but first i want to be sure before to mess with everything ahah.
but first i want to be sure before to mess with everything ahah.
Cheers
Simon