Hi! I am a student researcher, and need to be able to communicate with my plane over a small hill that blocks line of sight. The setup is effectively this:
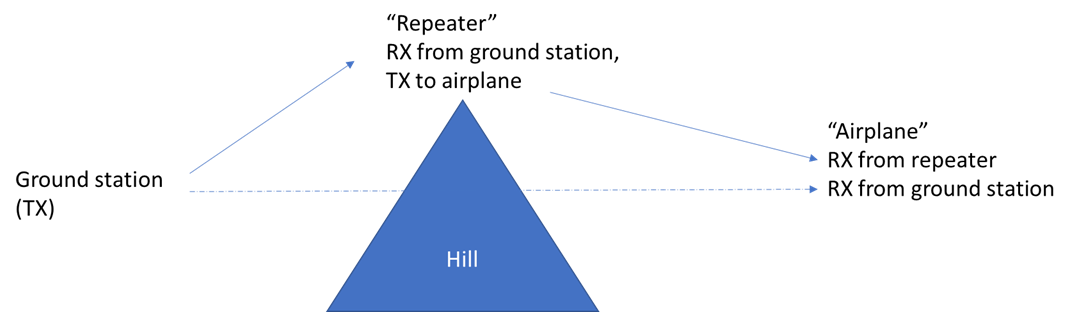
The plane takes off from the ground station, then follows automatic Mission Planner waypoints to do some surveying on both sides of the hill. On the far side, we lose line of sight with the airplane, and therefore also lose any signal connection.
I have been trying to construct a “network” that will repeat the RC and Telemetry signals over the hill, using the Multiple Receivers configuration:
https://ardupilot.org/copter/docs/common-multiple-rx.html
But, these seems to only apply to the RC IN channel? Seems like the RC IN will switch based on whichever signal is strongest. I would like to use that same functionality to also determine which Telem port (1 or 2) the Pixhawk sends information out of such that I we receive the correct data back at the ground station. Is this possible?
Hardware:
Pixhawk 4: https://docs.px4.io/v1.9.0/en/assembly/quick_start_cube.html
Dragonlink RX/TX: http://www.dragonlinkrc.com/instructions/v3equipment/v3completesystem/#
Please let me know if there is additional information I need to provide!