Hi All Thanks for any help. And please point me in the right direction if there’s an existing post that includes the information I’m after…
I’m having difficulty with getting turning parameters correct for my cataraft mapping boat project inspired by @rmackay9 posting: DeSET mapping boat in Okinoshima Japan
I’ve spent many hours over several days at a nearby lake trying to get the parameters correct following the First Drive with Rover / Tuning Turn Rate instructions. I can’t seem to get rid of the fishtailing. All I can do is make it worse by changing things when the boat is in any one of the autonomous modes.
I’m providing the GNSS Ntrip corrections from a local CORS GNSS base station through mission planner so the navigation is almost entirely fixed RTK. Ive calibrated the compass with large vehicle calibration and acceleration calibration of “calibrate level” and “simple accel cal” when the vehicle was level on the trailer before launching - they were both successful.
There is occasional wind of about 8-10 mph by mid day but early it was dead calm and there was not a noticeable difference in line following ability. The Torqeedo motor is very powerful for this rig and has no trouble pushing it around.
I’ve started with defaults of 0.2 for P & I, 0 for D, 1.0 for Imax and ranged FF from 0.0 to 4.0.
I’ve also moved ACRO_TURN_RATE from 5 to 90 (I think about 15-20 is what it should be based on watching pidachived vs piddesired in acro mode.
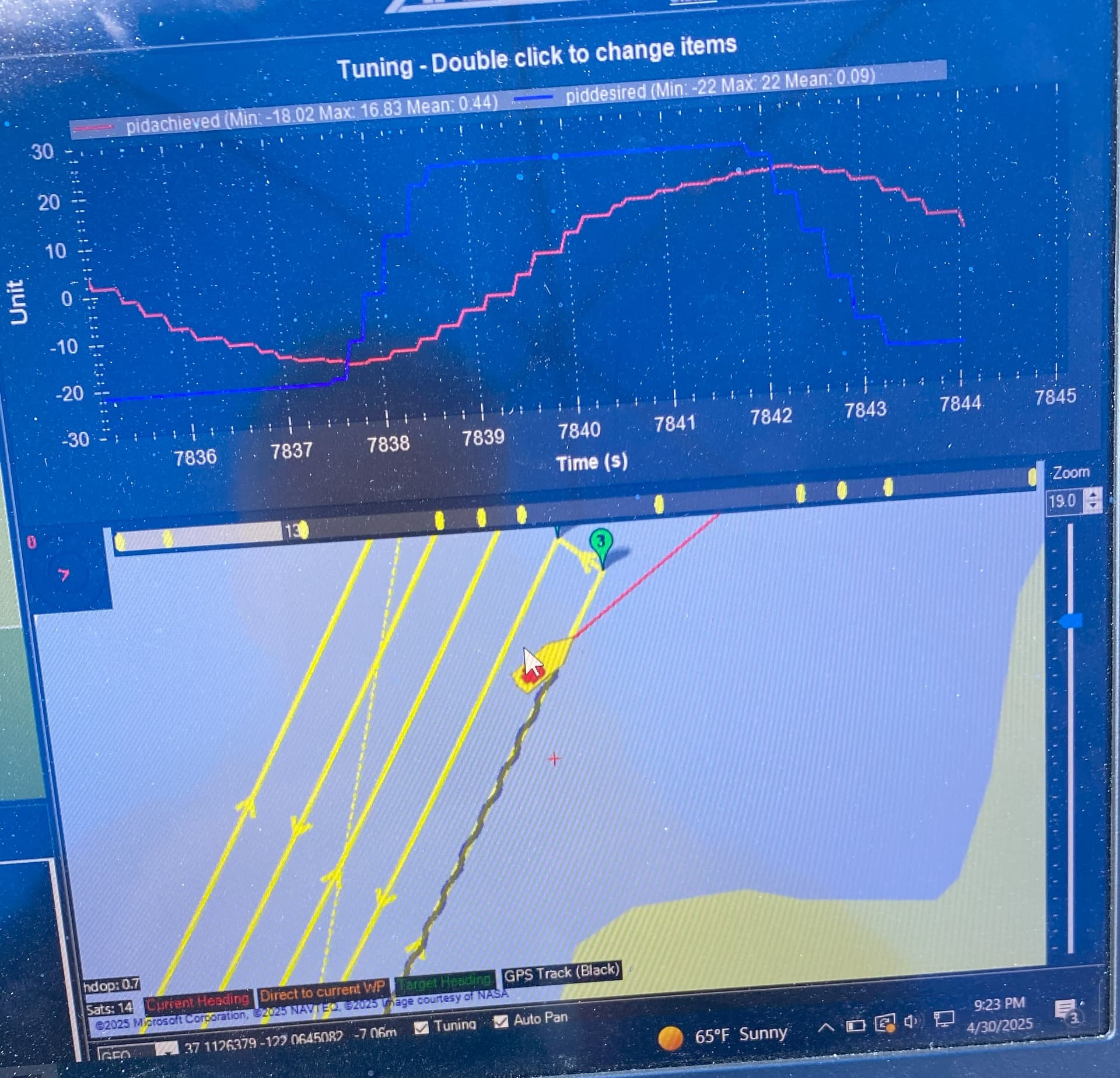
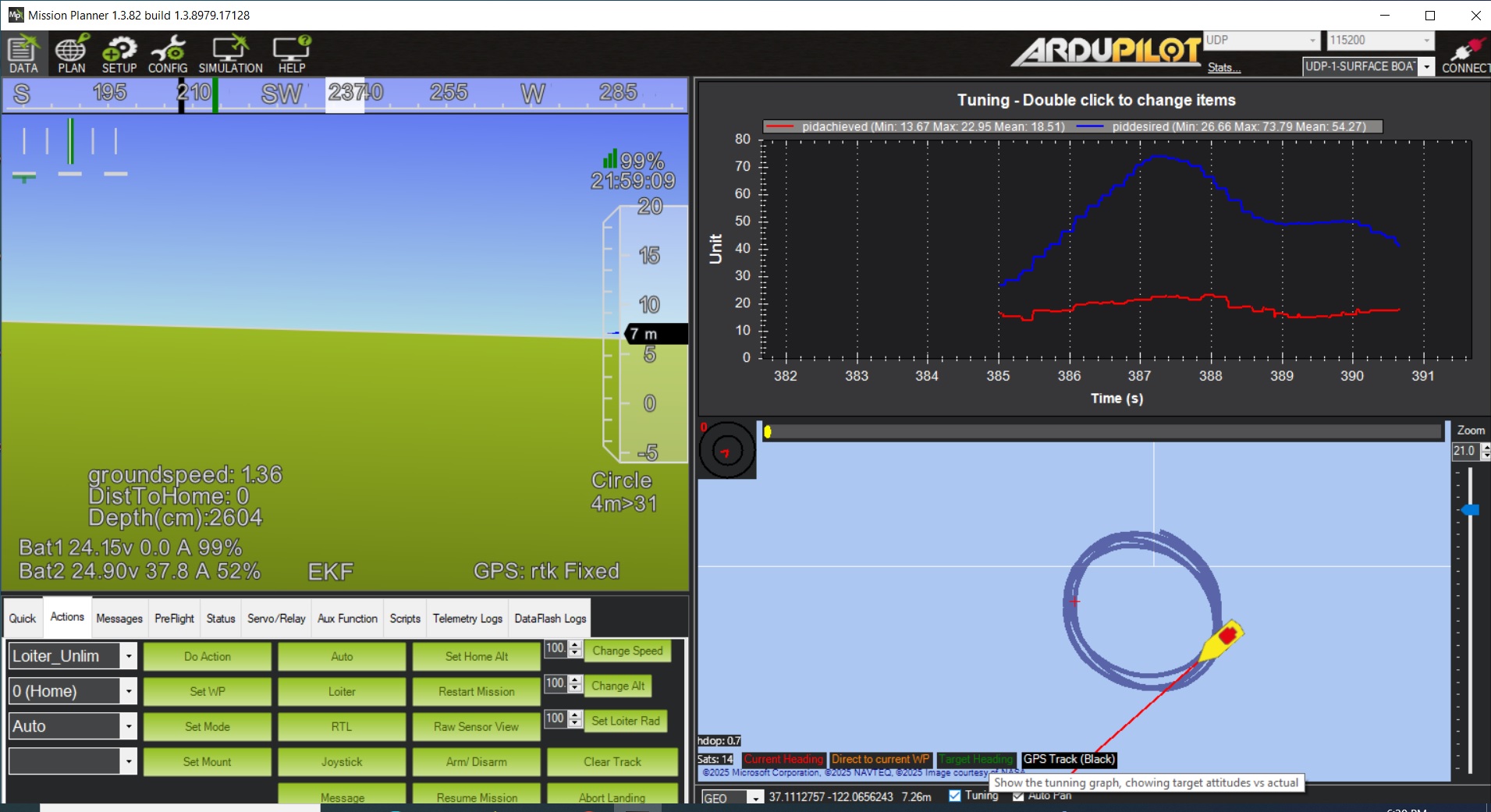
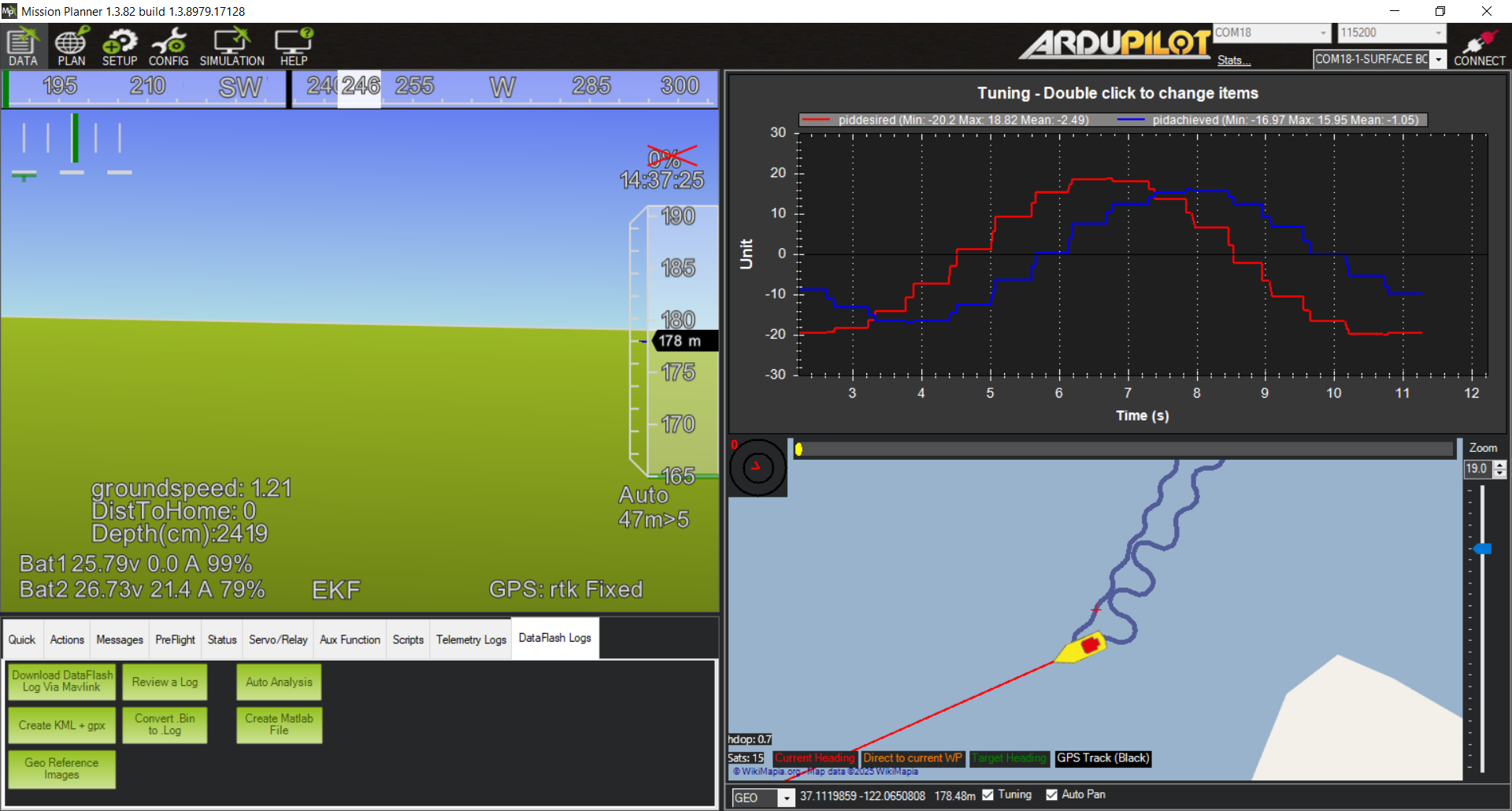
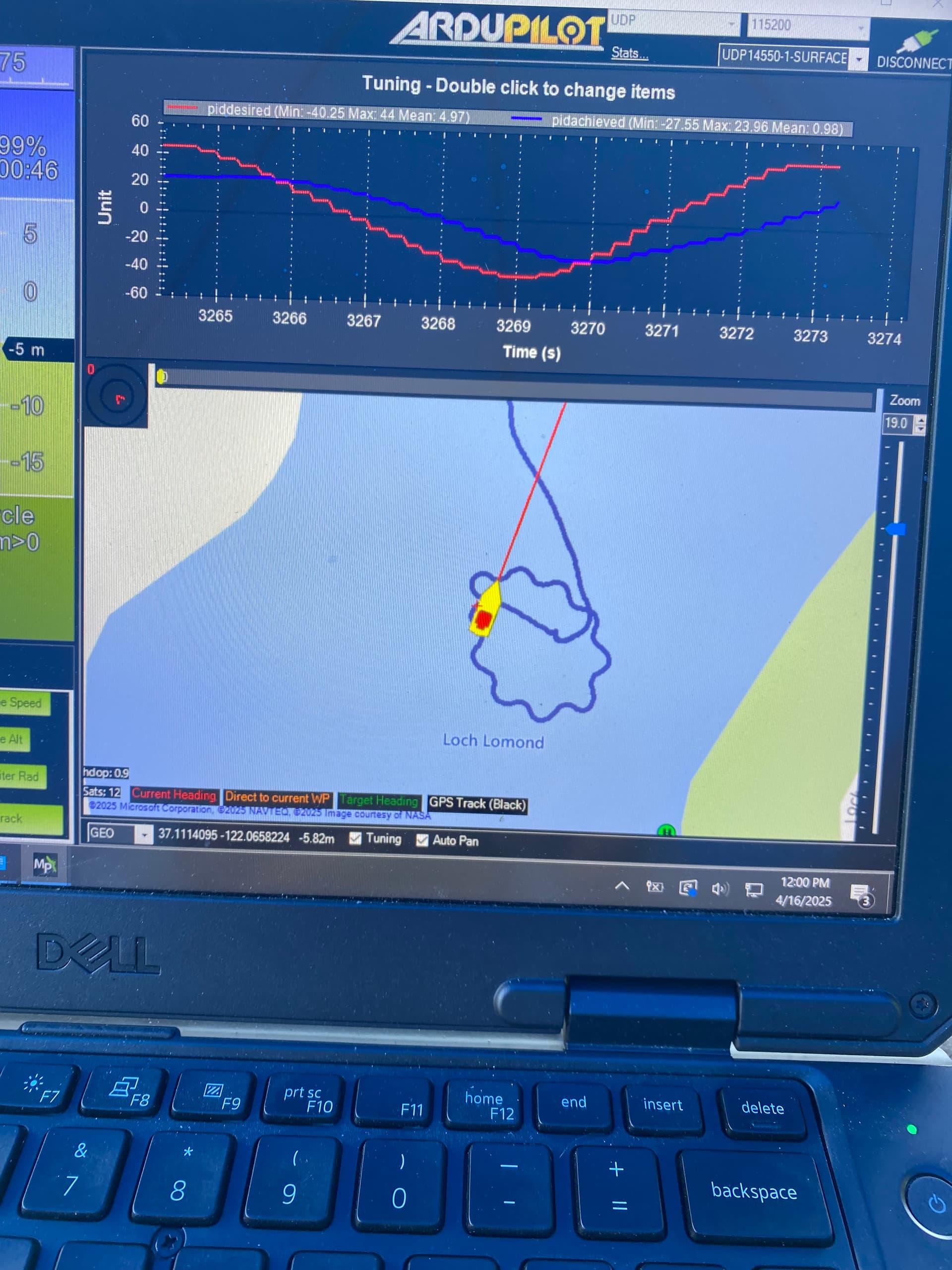
In manual or acro the boat can be driven well. It is very maneuverable and tracks straight but in circle mode, drive to here, or survey in auto it fishtails as seen in the screen grabs below - the first one demonstrates where I modified FF while underway where the fishtail amplitude was much higher. For scale the line spacing shown is 10 meters and the circle radius is 20 meters.
Note that the yellow & white Trimble GNSS antenna shown on the front of the boat is Not the one used by the autopilot. There is a smaller dedicated antenna on top of the white Yeti cooler about 0.5m directly in front of the cube orange which located inside the electronics box with the transparent lid. The antenna a high quality talllysman 33-7972-00 GNSS antenna but has a mag mount so I couldn’t place it directly above the cube orange without the compass being bothered.
The frame on the front gets lowered to the position seen in the video once the vehicle is away from shore so the tubes are submerged ~0.5 meters below the water surface during normal operation/survey. I did all of the testing/tuning with the tubes deployed but did try with them up out of the water to see if there was much of a difference and the answer was no.
A video of the system operating in ACRO mode [P=I=0.05, IMAX=1.0, FF=1.0] can be viewed here:
A close up video of steering the motor via RC control is shown here:
Parameters:
LochLomondEndofDay16Apr2025.param (15.6 KB)
Note- Acro_Turn_Rate and the ATC_STR_* parameters were modified several times during data included in the log files below]
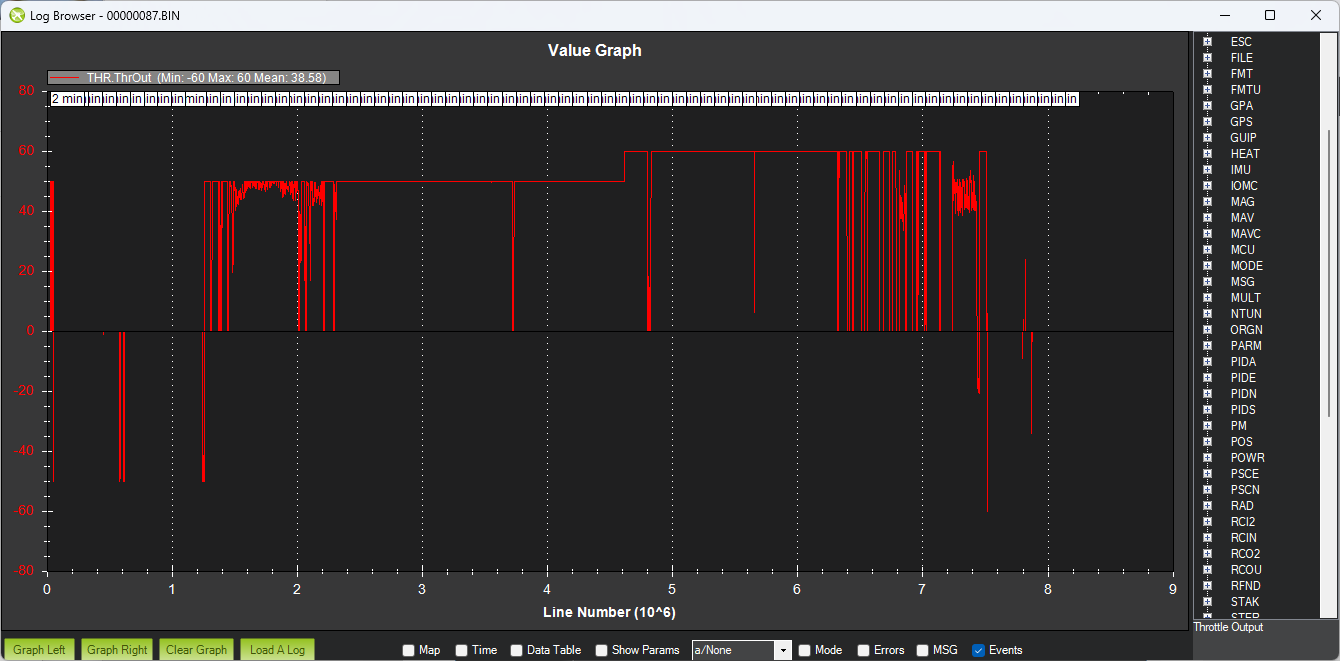
Logfiles:
System:
Cube Orange autopilot with Rover/Boat firmware recently updated.(6 months)
Septentrio Mosaic X5 GNSS (operating in RTK mode)
Torqeedo Cruise 3.0 R
Herelink remote control and air-unit.
Custom steering mechanism using Pololu Tic 36v4 stepper motor driver to power a high torque Stepper connected with a modified rack-and-pinion steering system operated as a steering servo.

If anyone would like more information I’m happy to provide.
Thanks for reading
Gerry