I read the ArduPilot blog on VTOL and understand that Tilt-Rotor aircraft are labelled as Quadplanes.
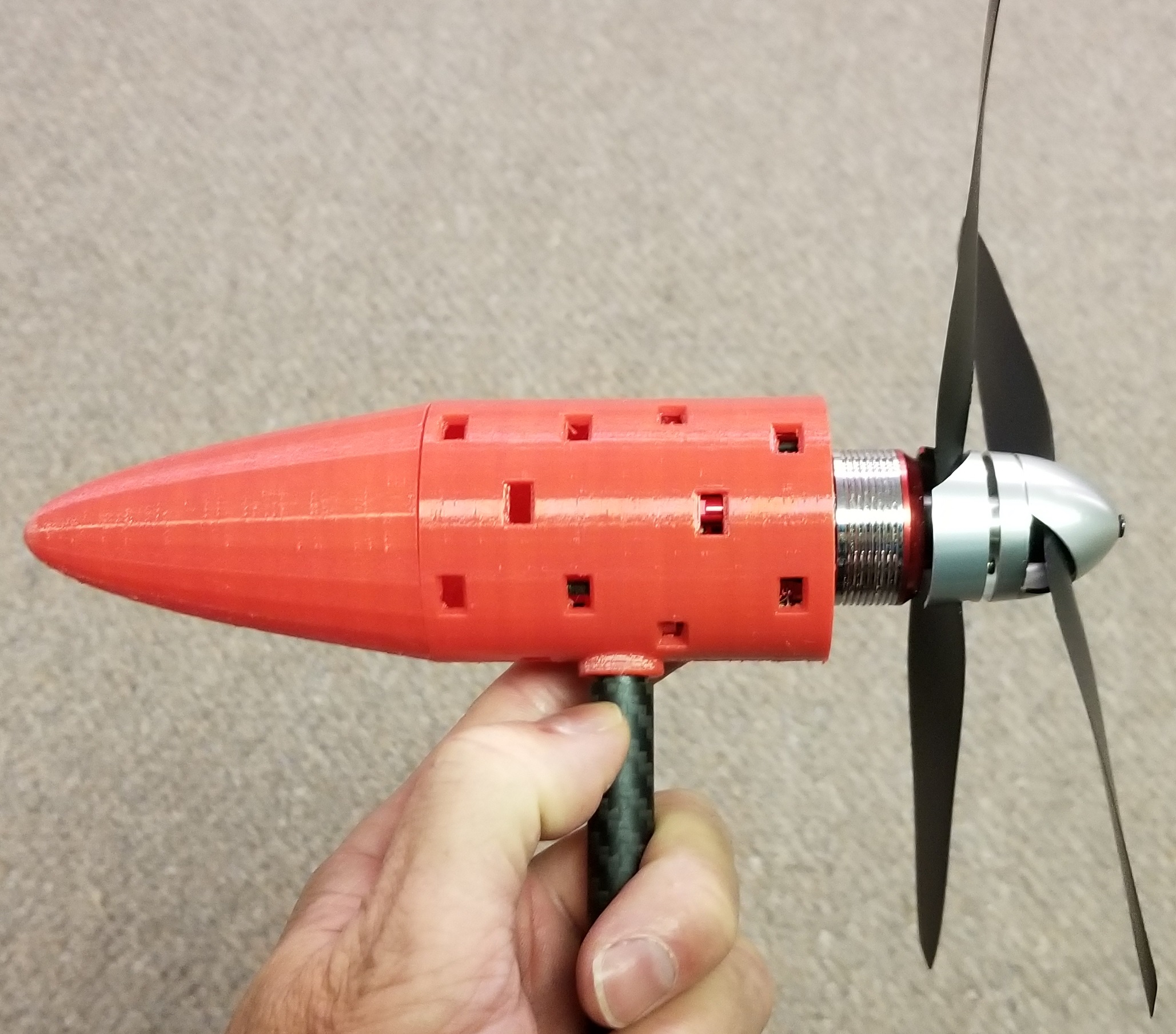
So I am working on a project to develop a known fixed wing called the RQ-7a Shadow into a VTOL/STOL airplane. The idea is to install on the wing tips tilt controlled counter-rotating engines. I have one on my work bench with a 3D printed nacelle which will be tilted independently from the opposing engine on the opposite wing with it’s own servo tilt motor.
I read that your firmware supports “Vectored Tilt-rotors” but I couldn’t determine “Q_Frame_Class” and Q_Frame_Type" parameters. I’m assuming that “Q_Frame_Class” would be set to 1 for Quadcopters as I’m using four output channels to drive each of the two counter-rotating motors. What I’m not sure of is what value I will need to the “Q-Frame_Type”?
Hey,
are you refering to the original RQ-7a or to the hobbyking kit? The origninal has an MTOW of arudn 150kg, you need some serious thrust to get that thing safe in the air.
HobbyKing use to sell the Balsa/plywood kit but I will be ordering one from China. As for lift power, it’s early in the research and development process. Still need to order the frame and build it out. As for these motors, they run 8x4 propellers on two motors rated 900-1400 Kva. I may need to consider other options but for now I have a thrust jig and plan to test this engine on it using 2x 40 amp ESCs to determine thrust and power requirements. It’s possible this combination my be under powered for VTOL mode and over powered for plane mode, but what the heck, gonna try it and see what I get out of it.
IMHO, you’re setting yourself up for failure. It wouldn’t surprise me that you’d end up 4.5kg to 5.5kg AUW by the time you’re said and done. If your idea is basically a bi-copter design, I recommend calculating at least 1.5 to 1.6 thrust-to-weight ratio. Your motor design looks good but I’m not sure that a 2000mm span aircraft is the appropriate size for it.