Hello everyone!
I am building my first quadcopter, and my receiver isn’t working. Would be very grateful for some help. I am a mechanical engineer, I have limited experience with electronics and no experience whatsoever with ardupilot. My build consists of a Matek F405-CTR flight controller running Ardupilot firmware, an FrSky R-XSR receiver, 4 BLHeli-32 ESC’s, a Foxeer camera and a video transmitter from Team Blacksheep. My transmitter is a Taranis QX7. The video transmission is working, I get the FPV camera image with OSD showing like it should in the connected FPV goggles. I get all motors to spin when doing it through QGroundControl. I am able to bind the transmitter with the receiver and perform a range check, but when connecting the flight controller to QGC, no movement shows in the radio setup page. The Sbus wire is connected from the RC to the Sbus port on the FC, and based on advice from ChatGPT, I have set SERIAL2_PROTOCOL to RCIN and SERIAL2_BAUD to 115200. Now I don’t know what else to try. Tried deleting the model from the transmitter and rebinding. The blue LED on the RC is flashing, indicating Sbus mode. I am kind of stuck here, I have no idea what else to try. Does anybody have any suggestions? Thanks in advance for any help!
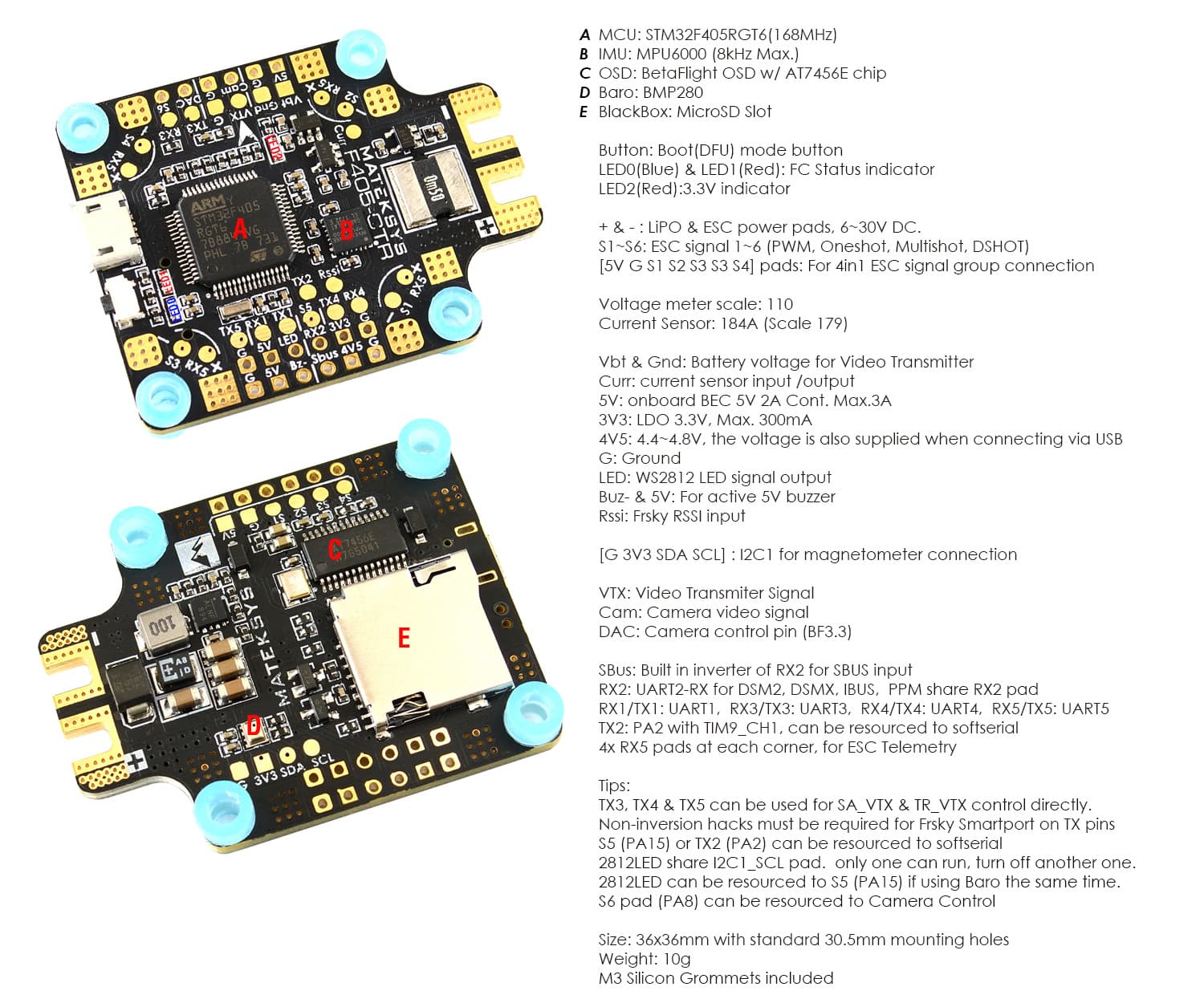
I followed this wiring diagram when connecting the receiver:
Your first mistake.
Always start with the Ardupilot board specific Wiki page. Matek F405
With default parameters the Sbus pin is already configured for Sbus. So unless you have some other protocol (Fport, CRSF, ELRS, etc) is should work with no parameter changes.
And a reference using Betaflight, or iNav, will not help you with Ardupilot. You can see on the Wiki page Default UART Order one reason why that’s true.
I have read the ardupilot “typical wiring” guide, and the Matek F405 ardupilot page. The default setup doesn’t work, that is why I tried ChatGPT. I am not referencing Betaflight or iNav, why do you think I would expect them to help? Also, you say “your first mistake”. What other mistakes did I do?
The manual for my receiver says it has Smart Port enabled, and so I have connected the S.Port connector on the receiver to the TX2 pin on the flight controller. Is that correct?
It seems that S.Port are bi-directional. The same for FPort, if my receiver supports that (I have no idea). Do I actually need two signal connections to my FC from the RX at all, is this messing things up? Should I remove one of them? Should my S.Port connector go to the “sbus” pin?
I am not sure what typical wiring you refer to and what pages and documentation you read. Also I not know ChatGPTs answers.
But very often a TX pin on a FC is normally an output and not an input
I am no expert and not knowing Frsky S.port. But it seems something like a bidirectional telemetrie port. But you are not looking for telemetrie as I understood but for the RC-signal. This is on SBUS out