I have just started experimenting with ArduPilot on the Copter side of things, for autonomous fleets of UAVs and want to expand autonomous missions to ground assets. Sadly, it will be challenging for me to spend proper time building a rover right now as it is a work related project and other more boring things also occupy my schedule…
And so, does anyone knows of “ready-to-use” UGV with ArduPilot hardware? Or a build/ kit that might/should be straightforward Without breaking the bank…
On the copter side, I have bought a few Sky Viper’s and they are great for my purpose, was hoping to find an equivalent on the ground side of things but my frantic Googling hasn’t yielded much…
Aye – I did find this little guy and it looks awesome!
However – it qualifies as breaking the bank at the moment hahaha (The Ardupilot version is $1300), well at least until I can make the case for a proper investment in this project, especially because I would ideally want to buy a couple at least to experiment with coordinated operations…
You could do what I did and buy a ~$200 RC Crawler and add a Flight Controller and accessory hardware. I used a PixRacer I had but there are several other good affordable choices.
A Redcat Racing Everest Gen 7. It works really well. I 1st tried a 4wd dirt racer style truck but even geared down it was too fast and cogging at low speed was a problem.
I focused on the flying guys over the last month and it’s coming along decently and I’m now ready to pull the trigger on a rover, @dkemxr you seem happy with your Redcat Everest, and I’m thinking about following you on that – any hiccups or different recommendations? I read thru another huge thread from @ArduNoob and wanna make sure I know what I’m getting into
I like the Redcat Gen7 for an all-around fun vehicle to convert to a Rover at a good price. Being a crawler it has the features you really want and there is a good amount of space to mount components. In the attached you can see I secured a styrene plate with some L brackets to the frame and an aluminum plate to the rear with what I had on hand. It drives for a very long time on the 3S 6400mah battery which fits the tray nicely. I’m using a PixRacer and a Frsky 900Mhz reciever.
Aye, that’s a nice setup! Is that the Gen7 Sport or Pro ?
The couple of things I’m thinking about are water proofing the ArduPilot hardware, like setting it up in an enclosure of a sort, and adding a RPi as CC.
It’s a Sport. Making it waterproof, which the base vehicle is, would be nice but a bit challenging if you want to keep the stock body shell. The spur gear is not in a great position to work around. But you could do it with a small FC. One of the F4/F7 boards would be a good choice.
Also, I’m reading about setting up the Pixhawk and I’m on the rx / tx part. It seems I wouldn’t be able to use the stock receiver directly, is that correct?
Either change to a PPM sum one – like FrSky – or use a PPM encoder?
Yes, that’s right. You need another RC control system anyway for Ardurover. The stock Rx is apparently 3 channels but the Transmitter is only throttle and steering with no switch for the 3rd channel. I think you will want a minimum of 4. Throttle, steering, flight mode, arm/disarm. I usually have a separate switch for RTL and maybe you will want more to do some interesting things. I also like having telemetry data on the transmitter and Frsky passthru is very nice on an OpenTx radio.
Forgot to mention that I use 2 more switches/channels, one for Forward/Reverse and a pot for Expo on the steering servo. Both of these are personal preference and not required. I don’t like having a center throttle neutral and stick up forward, stick down reverse. I use a switch channel to change between forward and reverse at stick zero kind of like how you would drive a car.
Gotcha ! Thanks @dkemxr !
I’ve pulled up the trigger on a Gen7 – will be here by Monday so I will (hopefully have to time to) start tinkering with it. I’ve also sourced all the other pieces I need – I think.
Thanks for the pics btw, that was very helpful in visualizing and piecing it together. I took a closer look at your “flight hardware” platform and it’s nice ! I have a pixhawk so I’ll adjust and may regret the extra space it will be occupying, but plan on setting it all similarly. I may try to 3D print the platform as a box to get to the waterproof version, or at least weather resistant.
I will probably have more questions…
@dkemxr I’ve got the Gen7 Pixhawk-ed up and will start configuring it shortly .
I found this screenshot with some parameters for your build – are those current? It’s my first contact with a Rover so I can use all the guidance I can get…
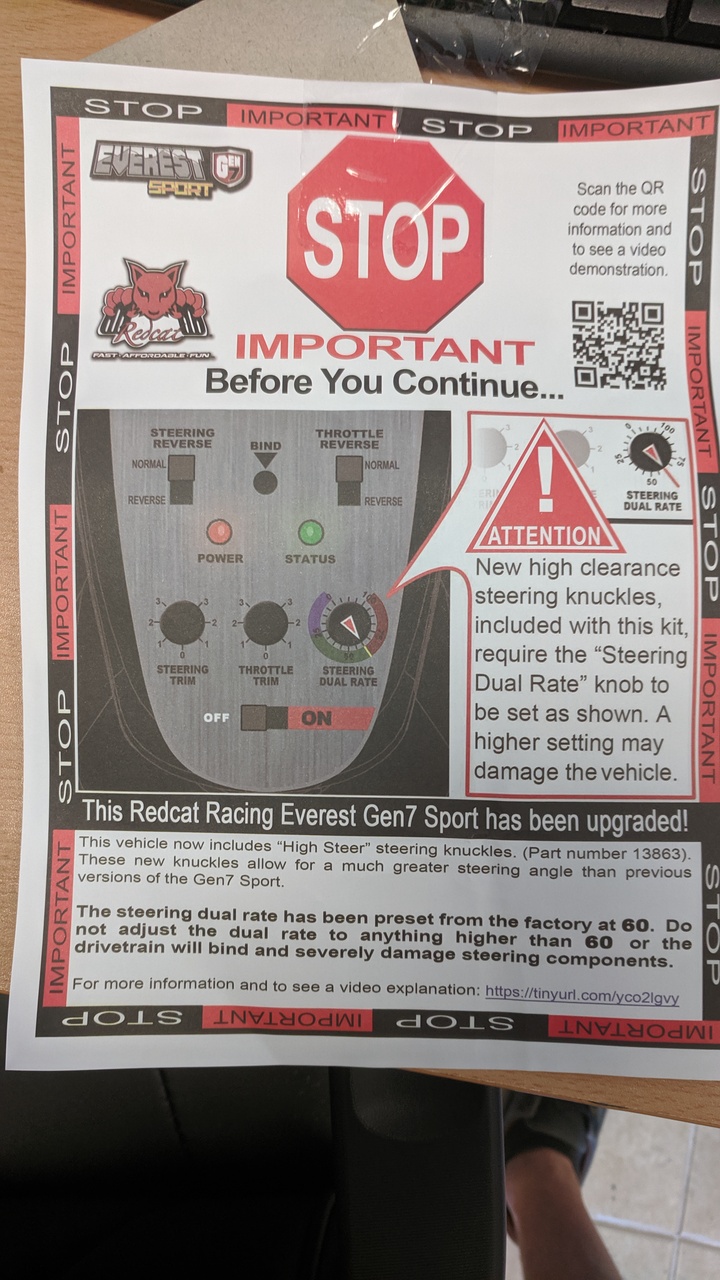
Also, mine came with this ominous notice – did yours too? In case some of the parameters would not be suited to mine…
Yes, those are current I just checked to make sure. I wouldn’t worry about the dual rate notice. You will find that you will have to set limits on the steering servo anyway to prevent the tires from rubbing on the shocks at full turn. I did anyway. In fact I added some spacers to the wheels to allow a bit more turn angle before this happens. Prepare for some fun and keep in mind the GPS location accuracy on the ground isn’t as good as in the air so give some generous space around obstacles for Auto Missions.
Attached is a parameter file from my Rover. Don’t load it of course but you can use the parameter compare feature to see what I have done. It might be helpful. Redcat Rover Ardurover parameters.param (13.4 KB)
Amazing – thanks for the reply and the params. I’m going thru the calibrations now, it seems that my Ebay Pixhawk compass is not keen on calibrating so I killed it (at least for now, might be interference from the Rpi I use as CC that’s also my WIFI telem) but I was going to ask if you’ve experimented with GPS blending and your take on that. I don’t expect requiring stringent position accuracy for now so I am not worried about the lesser ground performance, thinking ahead though.
Yea, the integrated compass’s are rarely of any use. I only have one craft (plane) where there is low enough interference from local stuff where it will work OK. I have not tried GPS blending since it has been fully supported in ArduRover but the guy in that post you linked to above did with results that were not really worth the effort to add a 2nd one. RTK is the way to go and I’m fortunate enough to have some local fixed stations nearby that are available for free. But the GPS module for the vehicle are still too expensive so I haven’t taken advantage of it.
 Without breaking the bank…
Without breaking the bank…