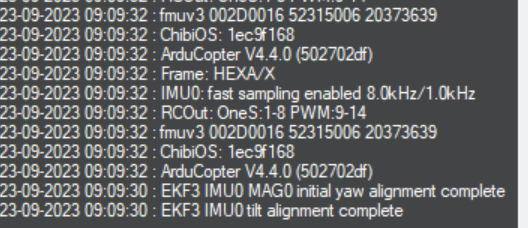
RCOut: OneS:1-8 PWM:9-12 PWM:14
After I crashed Pixhawk Hexacopter I found this issue also IMU0: fast sampling enabled 8.0kHz/1.0kHz.
Due to this the drone is not coming to my control and flies randomly by sudden raise in altitude at greater speed and crashes.
please let me know how to solve this.
for more details kindly follow: Pixhawk hexacopter crash - ArduCopter / Copter 4.4 - ArduPilot Discourse
These are normal messages, no problem would be “due to this”. The 1st is the output protocol you have selected and the other is typical for the IMU in that flight controller.
The issue is that no Oneshot outputs have been configured in the configuration, everything defaults to PWM.
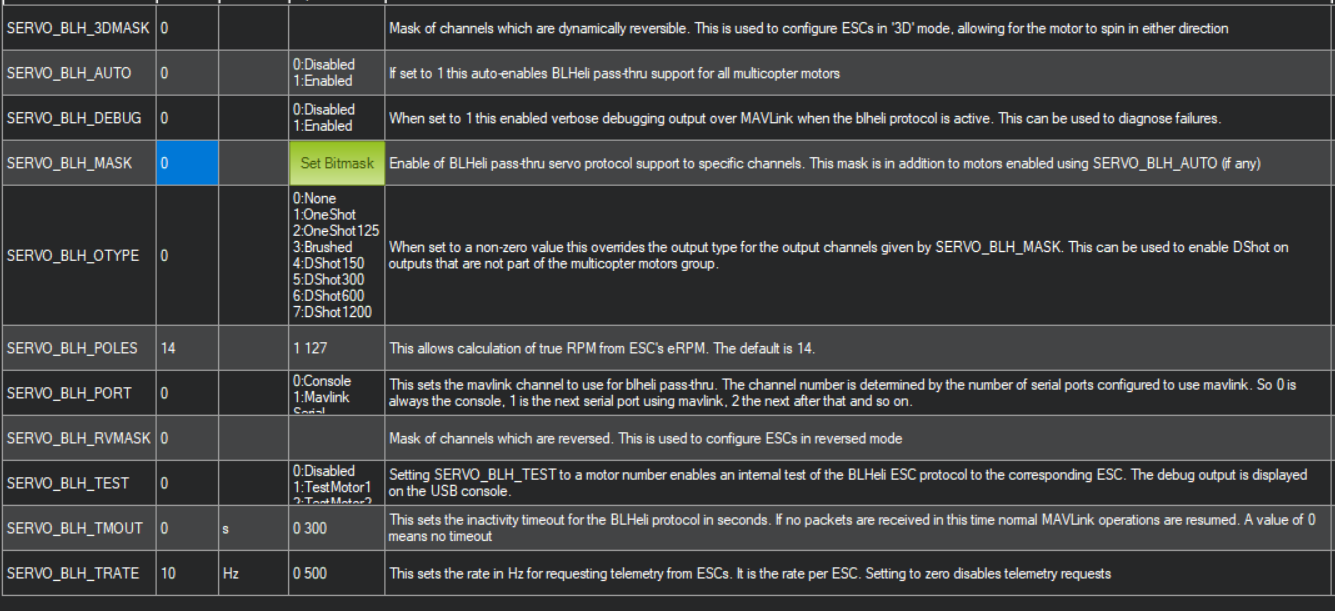

Your screen shots are not definitive of that. What is MOT_PWM_TYPE set to?
As I am new to pixhawk I don’t know how to solve problems.
Can anyone help me with solving the problem in step by step procedure…
So far you have posted multiple times about the same messages you have been told are meaningless relative to whatever problem you have.
Post a log of the crash flight. Don’t link to another thread, post a link to it here.
I’m going to agree with Dave. Post a .bin log file. Without a .bin log file we can offer you no further help.
Here is the log file for 2nd crash.
https://drive.google.com/drive/folders/1uUntk58HbNujZMfKlgZsCWOYQQTo5YtR?usp=drive_link
Here is the log file for 3rd crash.
https://drive.google.com/drive/folders/15BRCU7rcgaU2-rAX4Q_zbem4G26rgOIA?usp=drive_link
Most of the time EKF3 message will be displayed… why does it initialize every time.
Because it’s supposed to. Forget about these messages you know nothing about.
You battery voltage drops below 10V on throttle up. That’s not going to work. This battery is probably shot:

Panic switching Modes isn’t going to help matters either.
What is the solution? Does Changing the battery would solve the problem?
Or what should I replace?
Start there because that one is not good.
Greetings, But how is battery voltage drop is related to sudden raise in altitude?
Anyone please explain this because it would be useful for my research work also.
Have you done a motor test? Are all the motors spinning the the correct direction and the correct location?
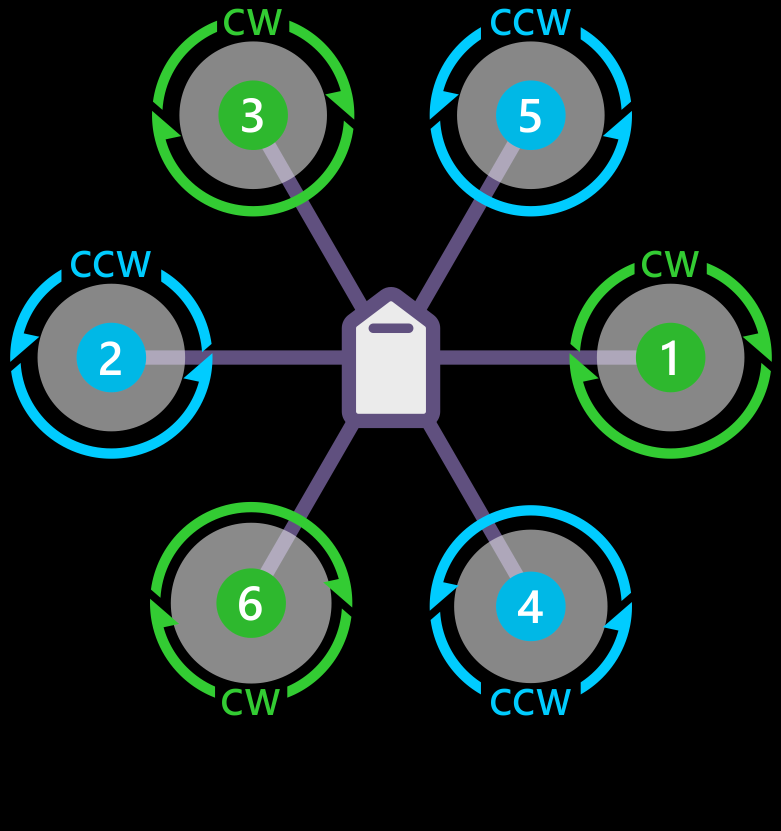
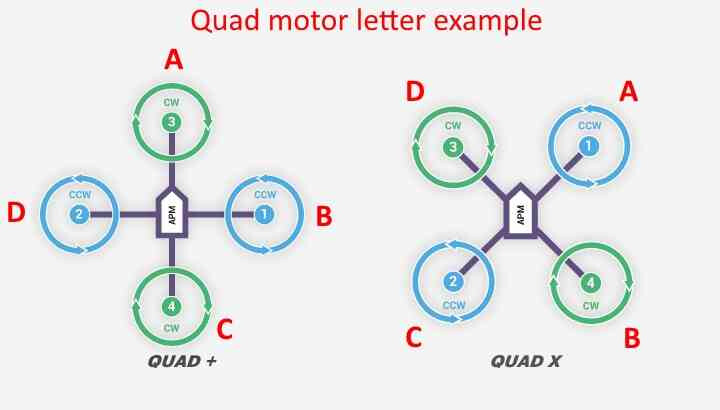
first motor to the right of straight forward in the case of X configuration. The motor test will then proceed in a clockwise rotation.
When testing the Hexa/X configuration the first motor to run during the test would be motor 5 (a) then motor 1 (b), then motor 4 (c) and so on clockwise around the circle.
Yes sir, motor test is done and and is working as per the image posted.
No issues with motor directions as well as numbering.