Hello ,
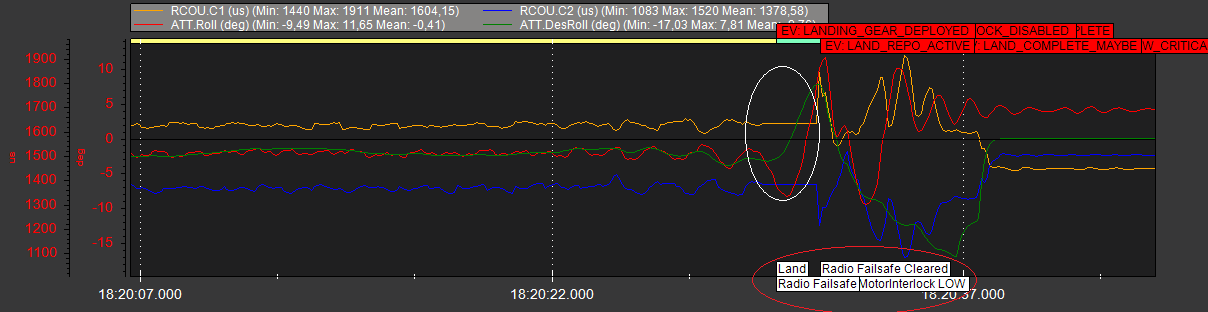
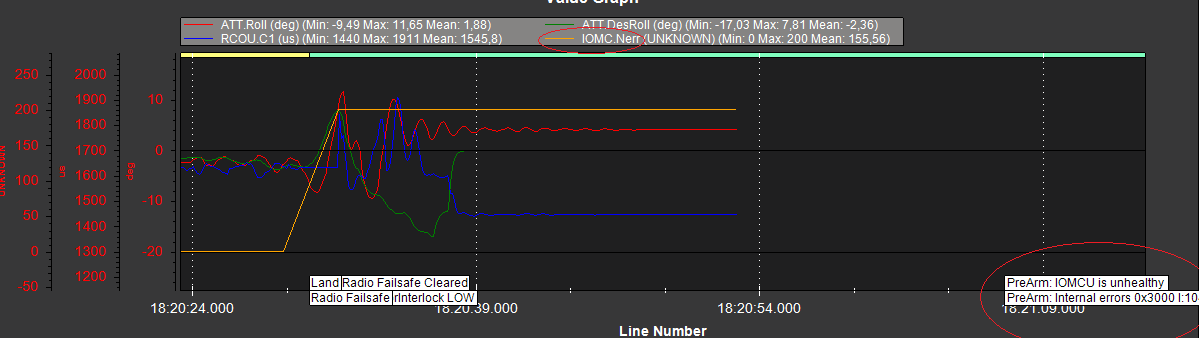
I really need your help with a problem on a flight, I had something really weird, as if the UAV (Heli) lost stabilization in half a second after that he took control , I had to stop the motors, no damage because it was on a net for fly tests, but in the log at this moment the pwm servo outputs were frozen for 2 seconds (18:20:29 - 18:20:31), and strangely a failsafe radio and a land event activated ! after that PreArm: IOMCU is unhealthy, as if IOMCU restarted during the flight, what is the cause?
after restarting the UAV flies well but I need to know the reasons because it can be very dangerous and risk for crash !
I will specify that it is a helicopter with custom firmware on Pixhawk 4 Holybro, is stable version 4.1.0 with a small modification in the library AP_Motor that I made , there is 6 servos with external Bec ,
Log : https://drive.google.com/file/d/1nUn1ezGTGrO0FQawJknbjZa51hCCJO-0/view?usp=sharing