One of our hexa-copter experienced a very serious near miss tonight.
It was on the routine offshore flight and flying in auto mode.
When it was quite close to the destination, it initiated a slow spin counter-clockwise for about 10 sec and began its crazy spinning until landing.
Our pilot miraculously managed to land it without any damage.
In the log, right before it started spining, there was a wierd message ‘RCInput: decoding SBUS(1)’. I’ve tried to find any information about that message but couldn’t really confirm that the message could be the clue of the wierd behavior of our drone.
Also, there was another message after that.
‘ArduCopter V4.4.0 (502702df). ChibiOS: 1ec9f168. CubeOrange 0045001C 31305105 30343339. RCOut: PWM:1-14. IMU0: fast sampling enabled 8.0kHz/2.0kHz. IMU1: fast sampling enabled 9.0kHz/2.3kHz. IMU2: fast sampling enabled 9.0kHz/2.3kHz. Frame: HEXA/X.’
If it was in the first line of the log, there is nothing interesting about it but it was in the middle of the flight and FC didn’t seem to have rebooted during the flight as it continued its spining until the end.
I used Airdata website to check the flight and found those messages above.
The spin seems to have resulted from motor 6 which stopped at the very moment drone began to spin.
Our drone used brand new, recently released (as far as I know) big motors.
Its design is a bit different from its predecessor with bent(?) looking thing on top of the motor which works great with cooling the motor.
We were quite happy with its cooling performance but it does not go well with our drone.
It seems to be causing a lot of vibration when operating and we could see that when drone is hovering in front of us.
Our drone’s arms are a bit flexible and we can see the motor housing is shaking badly sideways.
Bent is protruding upward and I guess that’s how the balance is getting broken. Also, motor is heavier than previous version about 40 gram.
Today, we tested with that motor once again in the field and the motor stopped again (but we safely landed drone) and we tested with previous version and there was no problem. Vibration on arms were gone as well.
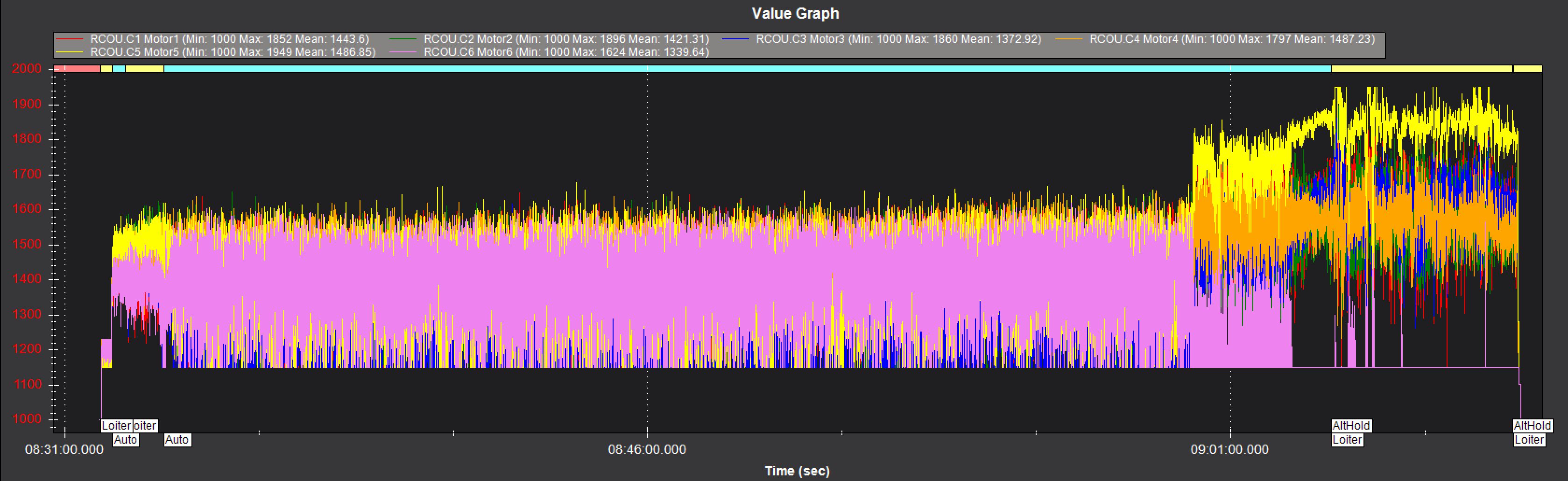
This is the Log when motor suddenly stopped in the middle of test flight.
Thanks for paying attention.
We will ask for replacement to T-motor but not sure if we need to continue using the motor. Arm comes with motor and ESC pre-installed so we can’t just replace the motor.
Did you review the RC Outputs from this flight? The output oscillation is terrible, it’s no surprise the Motor failed. Tuning looks poor, vibe levels are a bit too high, some Initial Tune parameters are not set and the Notch Filter isn’t configured.