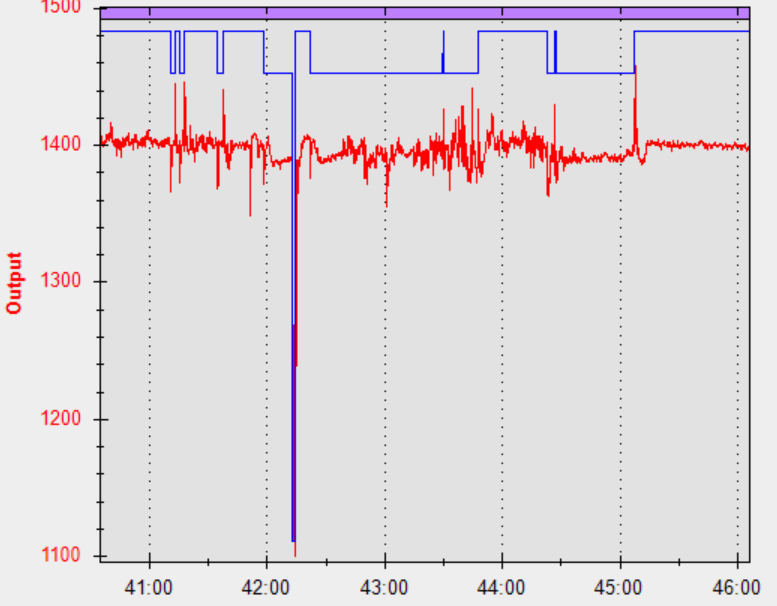
Why is there a change in RCIN when I am on an auto mission? Sometimes but not always this leads to massive RCOUT levels. In this case, my plane flew a barrel roll and then recovered. But what causes this if I am not touching my sticks (I swear I didn’t!)
Blue line is RCIN (should be stable) Red line is RCOUT. Here I expect the autopilot to do it’s thing - but what about the peak?
some more info about your RC system? this seems what your RC Rx outputs in failsafe condition.
from looking at your logs i’d say you’ve got RSSI on CH5 but not configured in arduplane.
That’s right. I get RSSI on channel 5. But Failsafe is off and shouldn’t cause this. What do you want to know about the RC setup? It’s a Frsky Taranis xd9.
I don’t really do anything with the RSSI except showing it in my OSD (the little white bar at the bottom of the stick display bottom center): https://youtu.be/EuJ82UgWl0g
I had stick_mixing=2. Could this be why any rcin also causes rcout? But where did the rcin signal come from?
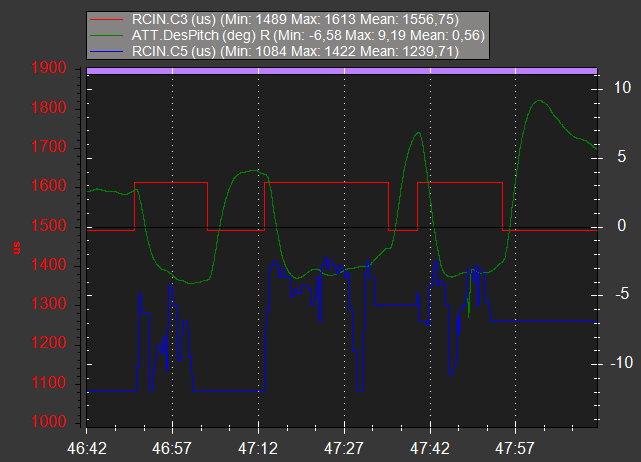
not that bad on roll, but pitch switches from 1489 to 1613 ms when rssi drops low, supposedly RC link loss condition. mind that when using sbus, rssi don’t update on link loss.
enough to trigger a -5 deg pitch demand temporarily.
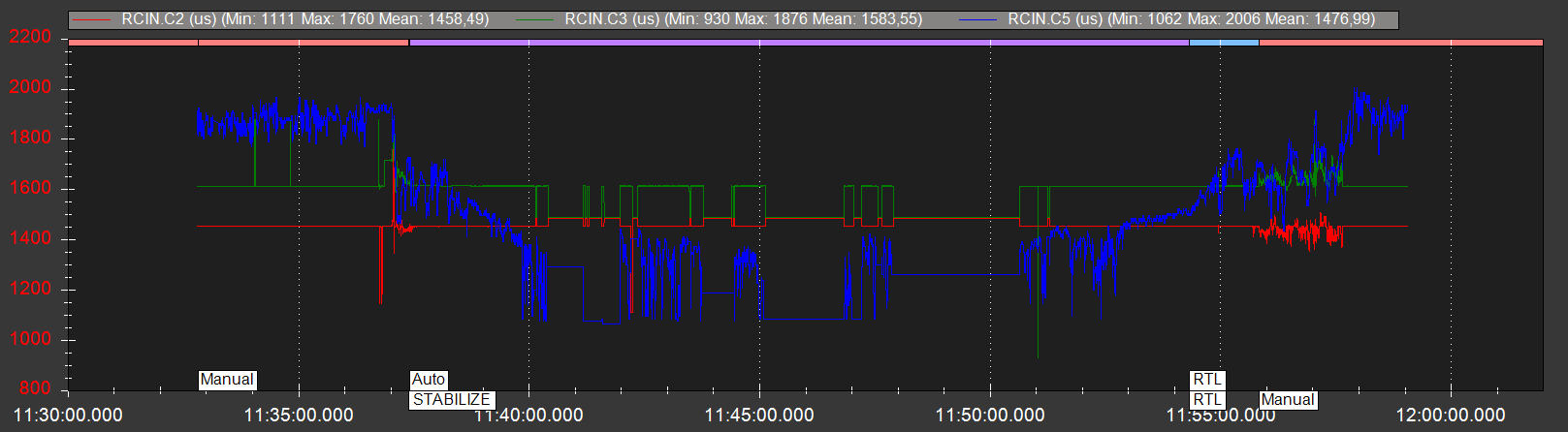
that doesn’t really explain the spikes on RC2 at 11:42:11 and RC3 at 11:51:03, but those imho are singular and way too short to cause trouble.
i’d personally suggest to double check your RC setup’s FS settings / link loss behaviour, setup rssi for added situational awareness and use arming checks = 1 (all) when flying auto missions on EKF without manual control.
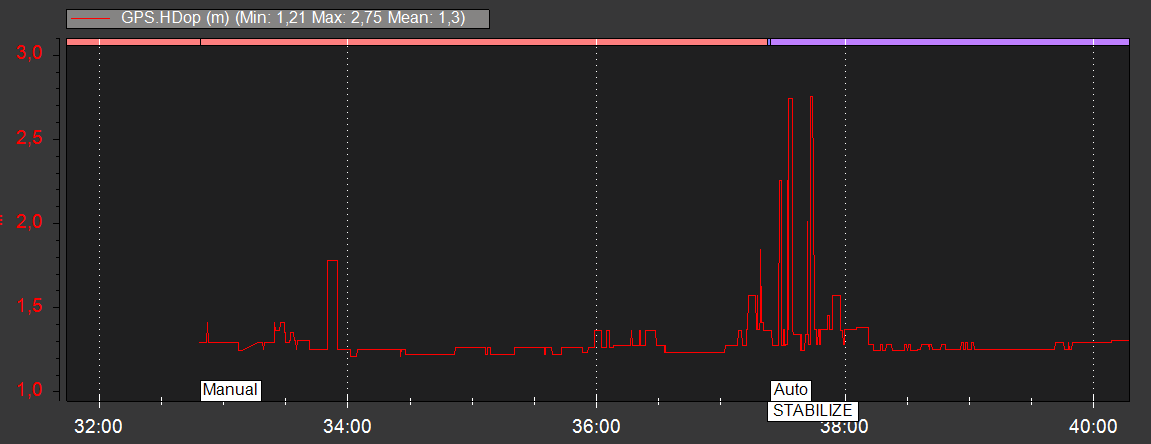
on a sidenote, somethings going on with GPS reception too: