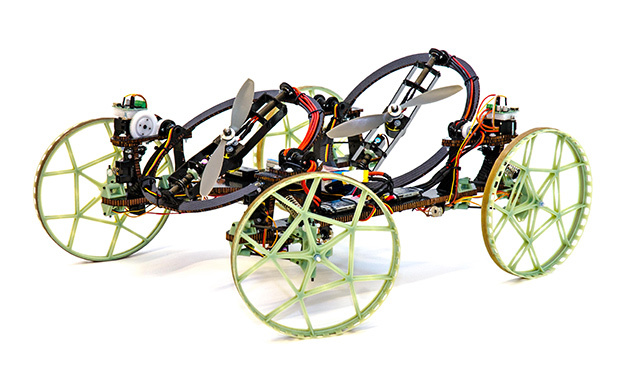
Hey guys, I am building a project for my mechanical engineering senior design course. We want to build a 4WD rover that will have 2 tilt drone props to allow it to suck to walls when climbing. Here is a picture of something similar. One main difference is that the 4 wheels will have independent motors to drive and steer, rather than relying on the props for all movement.
This video shows how the props will help it climb.
Will this be possible to control the gimbal/props while driving and steering the rover? I can’t seem to find any similar projects. I also need to include several actuators and sensors onboard, will I be able to customize controls to allow me to program and control these?
Thanks everyone! I am still learning about Ardupilot so I appreciate any help.
You can configure 4 outputs for Ground Steer and they will turn proportionally and in the direction you set them for but it’s not really independent. Front wheels turn right, Rear wheels turn left for example for a tighter turn radius. I’m not sure what you can do with the props and their actuators other than pass thru. When the wheels are driven will the props just be stationary to apply down force?
I would want to have full control of the gimbal while climbing. While on the wall, the rotors would be moving in sync, so that should simplify it a little bit.
The two drone props are mounted in a 2 DOF gyroscope gimbal. In “sync” meaning their movements will be synchronizes, as in, doing the same thing at the same time.
Look into lua scripting. If the vehicle mass is constant you can just set the prop motor and gimbal outputs based on vehicle attitude - I think everything you need already has a lua binding.