I have recently been trying to use 48-55 inch props, they are so huge!
I found that my vibe values are already very low, but I can still see some tiny twitches during flight!
I suspect this is because the prop speed is too low, so that the vibration frequency is below the 20Hz of the gyro low-pass filter.
I tried to set the gyro low-pass filter to 10Hz, but this setting made my copter have obvious twitches in attitude at small angles, which is very obvious in Loiter. I think 10Hz is not feasible.
Is there a solution other than using a notch filter?
Definitely set all these correctly:
BATT_ARM_VOLT
BATT_CRT_VOLT
BATT_FS_CRT_ACT
BATT_FS_LOW_ACT
BATT_LOW_VOLT
and the BATT2 ones
and if you need to you can set BATT3 as sum of selected monitors, to add together BATT1 and BATT2 - I assume you have two 12 cell batteries in series.
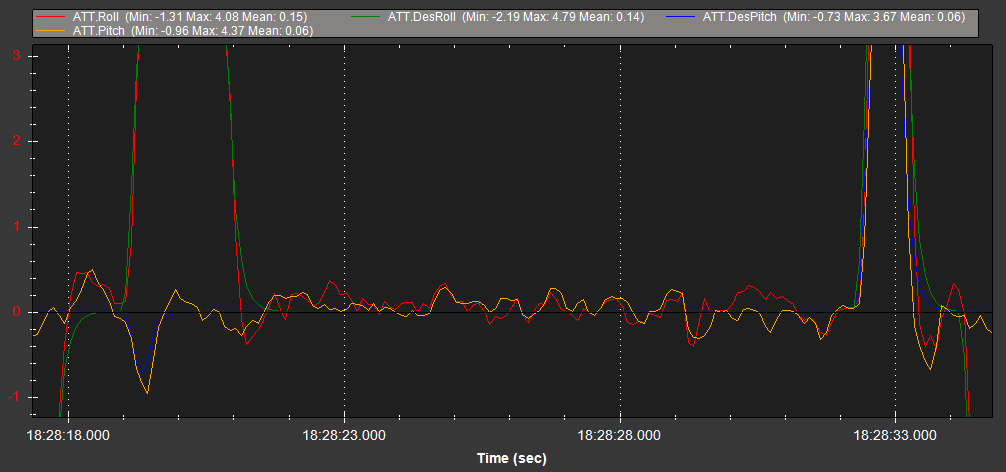
Lots of oscillation in the motor outputs.
I think D terms are too high, I would start with these:
ATC_RAT_PIT_D,0.007
ATC_RAT_RLL_D,0.007
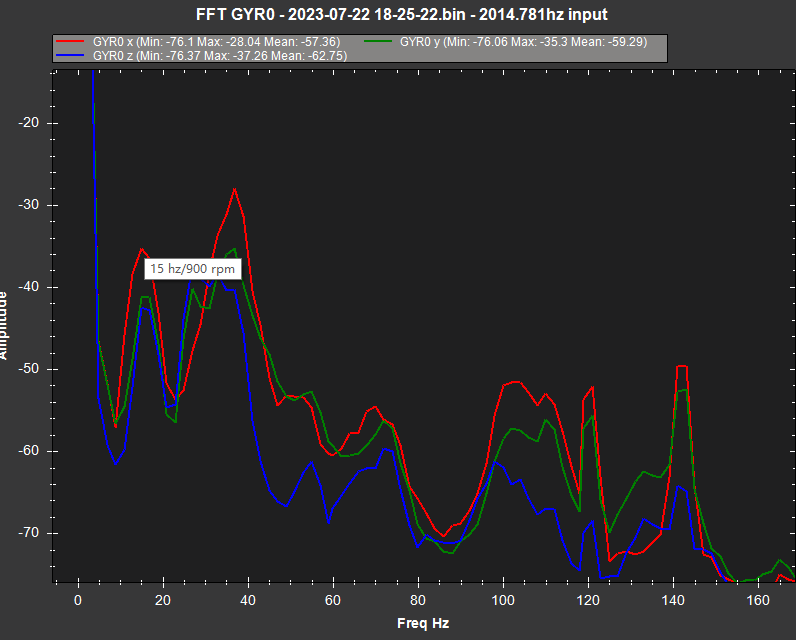
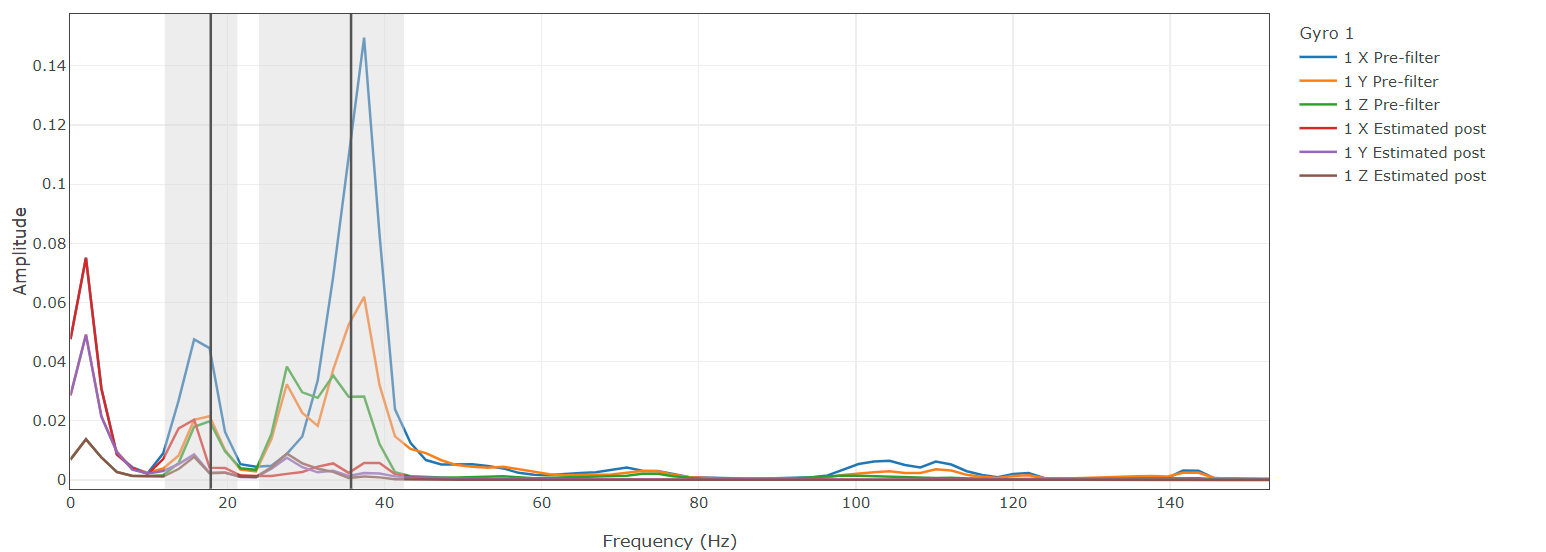
The best I could come up with in the filter review tool was:
INS_GYRO_FILTER,15
INS_HNTCH_ENABLE,1 // write this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.17
INS_HNTCH_FREQ,15
INS_HNTCH_BW,10
INS_HNTCH_FM_RAT,0.7
but you will have to tentatively check that this doesnt affect control - in the Filter Review Tool it looks OK.
I also have an Octocopter using 48inch props. I debugged it for three months and found that I could hardly set a gyro low-pass filter below 20Hz for it.
And when my RPM is at 1200, the 8Hz bw of the notch filter will also produce relatively obvious small amplitude twitches in attitude control at small angles.
Since I only used one rpm sensor at the time, when encountering side winds, the propeller speeds on both sides easily exceeded a difference of 4Hz, which caused my copter to twitch significantly in side winds.
According to my previous debugging experience, the filter settings you suggested may not have a good effect, and it can almost certainly cause attitude judgment problems.
I am currently trying to add an rpm sensor that can monitor and provide to the notch filter for these two copters. Due to the FC and ESC, I can only make a module that collects all the motor RPMs and sends them to the FC.
I am very worried that after the module I made fails, the aircraft may twitch uncontrollably, so I am still looking for physical damping or other methods, but it does not seem ideal at present.
This is exactly what I am worried about. In most of the attempts I have made, I have found that on my copter, when the cutoff frequency of the filter enters below 20Hz, it will almost certainly produce relatively obvious small amplitude twitches in attitude control at small angles, such as slightly moving the joystick and then quickly returning the joystick to the center.
If I reduce D terms, it can alleviate this problem, but reducing D terms will cause the copter to overshoot by several degrees in large amplitude attitude control. I am worried that this problem may cause the copter to crash, which makes me very annoyed.
I recalled a circumstance on a 36" propped quad that started with the poster having set the Gyro filter to 5Hz. This was like a large bouncing ball. Thru tuning runs it was determined that 18Hz was the lowest this could go on this craft. The frame rigidity was very good so the Notch filter could be set at 36Hz. There were some other issues with this craft but performance wasn’t bad. I realize your is much larger.
I’m sorry, this file was accidentally cleaned by me because the storage capacity was not enough. I will make it up, as well as some previous logs.
I think, if we need to use a notch filter, on such a large copter, we may only be able to use an rpm-based notch filter.
I tried to use an fft-based notch filter, but found that it was always attracted by high frequencies. Even if the frequency range was set, it was almost impossible to find the exact frequency.
But I am worried that my speed sensor will fail. If there is no other choice, I may need to spend time building redundancy for it.
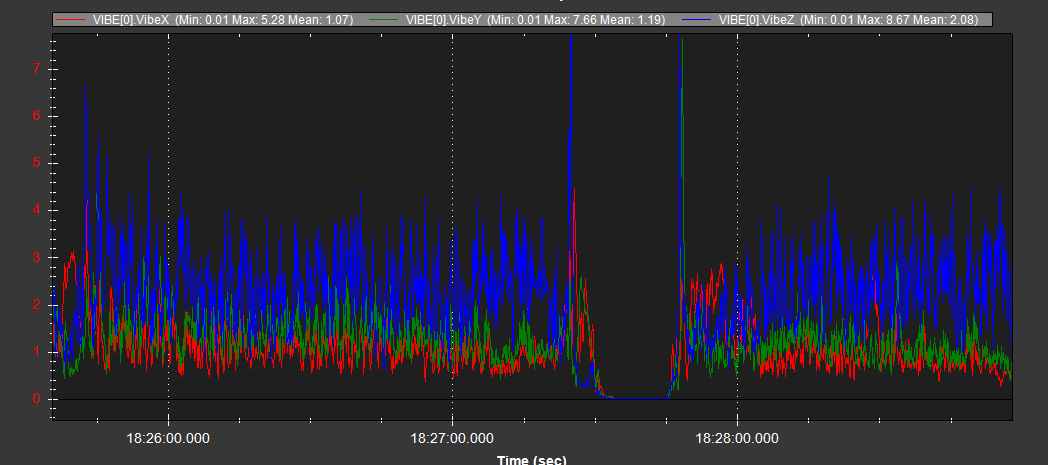
The vibe of the second log is not very good, but I think it may not be the main cause of the attitude problem. Of course, I am trying to reduce it.
4.3.0
I hope to continue using a relatively stable version, as such a large copter makes it difficult for me to bear the risk of crashing. Is the new version helpful for this issue?
But compared to the FFT-based notch filter, maybe the notch filter based on rpm sensor or esc telem is more stable? Their data all come from direct measurement of the vibration source.
It seems that I can only rely on the notch filter to solve my problem?
Filtering enhancements
- FFT notch can be run based on filtered data
- Warn of motor noise at RPM frequency using FFT
- In-flight FFT can better track low frequency noise
- In-flight FFT logging improved
- IMU data can be read and replayed for FFT analysis
4.5 will be awhile. 4.4 Stable would be next after betas and RC’s.
In Copter firmware version 4.3.2 there was an issue fixed with control and timing issue that looked exactly like what you describe too. I also had this issue but with a much smaller copter - a random slight twitch in Loiter as if you had flicked a stick or there was noise in a pitch a roll channel that just exceeded the dead zone sometimes. There was long loops and other issues fixed too.
So using the latest stable (now 4.3.7) may not have that twitch you speak of. The other non-firmware issues associated with using such big props could still exist of course.
Throttle-based notch filter should work OK, but RPM would be better.
In that latest log your D terms are definitely too high, I would go down to 0.009 as a starting point and re-assess.
It would be interesting to find out how this works in the real world.
INS_GYRO_FILTER,15
INS_HNTCH_MODE,1
INS_HNTCH_FREQ,15
INS_HNTCH_BW,5
INS_HNTCH_ATT,40
INS_HNTCH_REF,0.14
INS_HNTCH_FM_RAT,0.8
INS_HNTCH_HMNCS,3
This is not an ideal result, there is still some noise, but certainly significantly less.
The problem will be if the phase interferes.
There is more graphs, and an extension to the filter review tool that analyses the effect of the phase on PIDs - so there’s many more graphs to display… But in summary the phase change and attenuation starts taking effect up around 11Hz, and it looks like most of the “good” noise is below about 9Hz.
I think the stable version of 4.4.0 should be released soon, and I may have a chance to wait for it. I have recently been installing new rpm sensors for the copter, which has a lot of work, and I need some time to get them back in the sky.
The new log’s pid was obtained through autotune. After I completed the autotune, I did find a lot of twitches, but I didn’t dare to reduce too many D terms, for fear of crashing due to overshoot.
I am wondering if the higher D terms produced by autotune are related to Rate vibration, which may interfere with the FC’s judgment, or maybe it may be related to timing, I am not sure.
But in any case, I will try to update the firmware and readjust the pid…
thank you very much!
I secretly test flew it, I upgraded the version to 4.3.7, and reduced some P and D terms, set INS_GYRO_FILTER to 10Hz, and set fltt and fltd to 5Hz.
It seems that there is no problem at large angles, but there are still some small twitches at small angles. This seems to be due to the PID? I think my rate control should not see the frequency of vibration.
My directional control is a bit unbalanced, and I will adjust it later.