Hi everyone,
I’m newbie here.
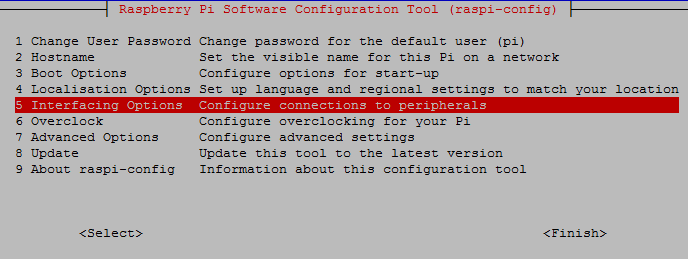
I am following this guide: Communicating with Raspberry Pi via MAVLink — Dev documentation
i know Rpi3 has changed the uart access,following reply form @fnoop Connecting Raspberry Pi to Pixhawk
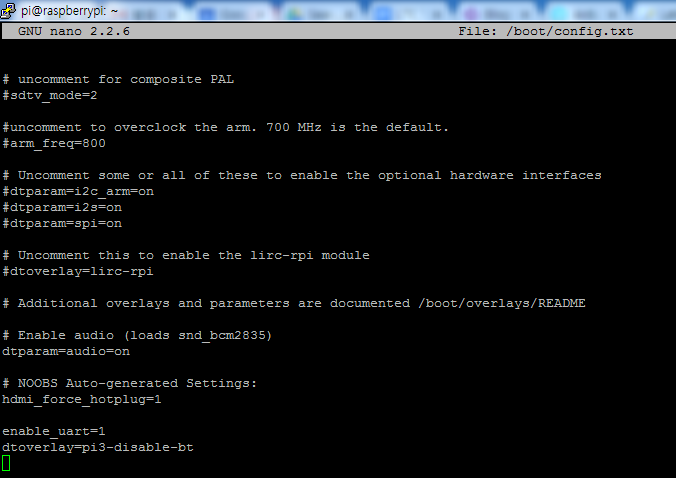
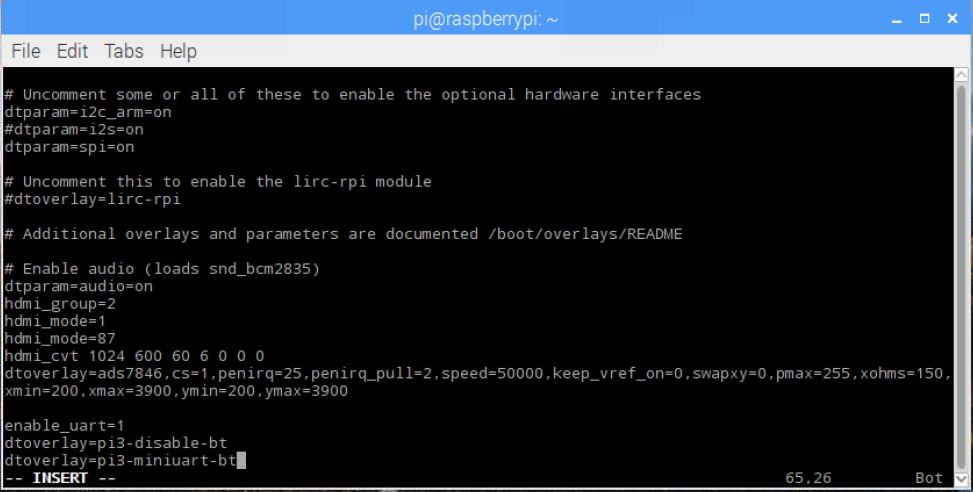
Add this to /boot/config.txt:
enable_uart=1
dtoverlay=pi3-disable-bt
then I got result below:
root@pi-desktop:~# mavproxy.py --master=/dev/ttyAMA0 --baudrate 57600 --aircraft MyCopter
WARNING: You should uninstall ModemManager as it conflicts with APM and Pixhawk
Connect /dev/ttyAMA0 source_system=255
Failed to connect to /dev/ttyAMA0 : [Errno 2] could not open port /dev/ttyAMA0: [Errno 2] No such file or directory: ‘/dev/ttyAMA0’
and
root@pi-desktop:~# mavproxy.py --master=/dev/ttyS0 --baudrate 57600 --aircraft MyCopter
WARNING: You should uninstall ModemManager as it conflicts with APM and Pixhawk
Connect /dev/ttyS0 source_system=255
Failed to connect to /dev/ttyS0 : Could not configure port: (5, ‘Input/output error’)
On the other hand, I also try this guide
https://frillip.com/raspberry-pi-3-uart-baud-rate-workaround/
In /boot/config.txt, add the line
core_freq=250.
Save and reboot.
I got result:
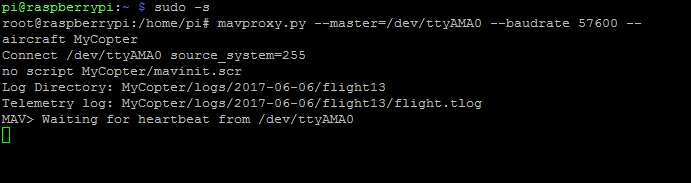
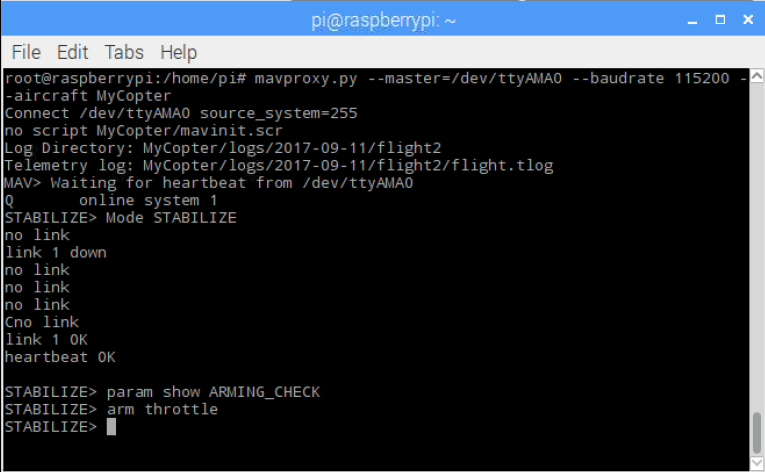
root@pi-desktop:~# mavproxy.py --master=/dev/ttyAMA0 --baudrate 57600 --aircraft MyCopter
WARNING: You should uninstall ModemManager as it conflicts with APM and Pixhawk
Connect /dev/ttyAMA0 source_system=255
no script MyCopter/mavinit.scr
Log Directory: MyCopter/logs/2017-05-10/flight6
Telemetry log: MyCopter/logs/2017-05-10/flight6/flight.tlog
MAV> param show ARMING_CHECK
MAV>
I am not getting any communication between the two.
and
root@pi-desktop:~# mavproxy.py --master=/dev/ttyS0 --baudrate 57600 --aircraft MyCopter
WARNING: You should uninstall ModemManager as it conflicts with APM and Pixhawk
Connect /dev/ttyS0 source_system=255
Failed to connect to /dev/ttyS0 : [Errno 2] could not open port /dev/ttyS0: [Errno 2] No such file or directory: ‘/dev/ttyS0’
They are both totally contrary to the result normally should be !!
The problem confuse me all day. Is there any configuration I might missed?
I use Ubuntu Mate: 16.04 on rpi3