Hexa Plus
Cube Orange
HW X9 Plus
36120 props
Hey all,
Having a few issues with Oscillations post-Autotune.
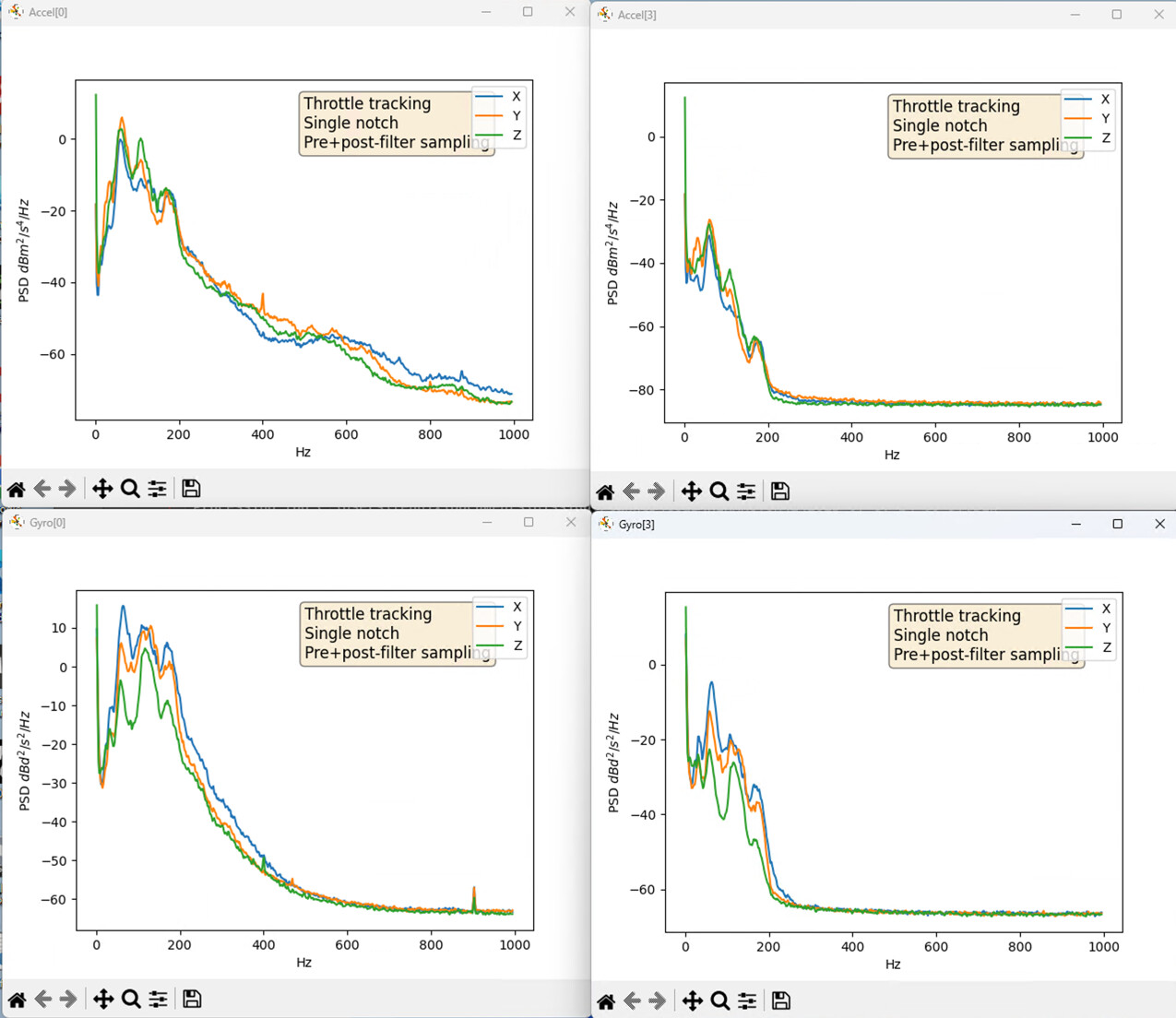
I’m hoping you can point me down the right path. I’m trying to progress to the Dynamic Notch Filtering part that I saw Andy P doing.
I’m still very much learning and getting my head around everything. Really trying to get to grips with reading logs to better understand things.
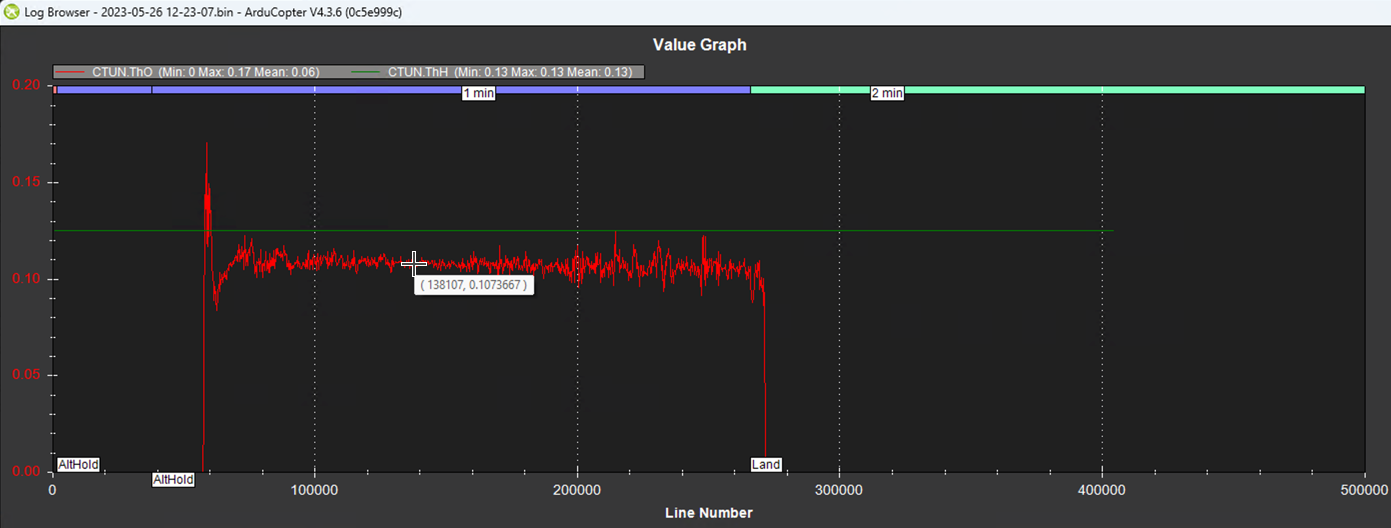
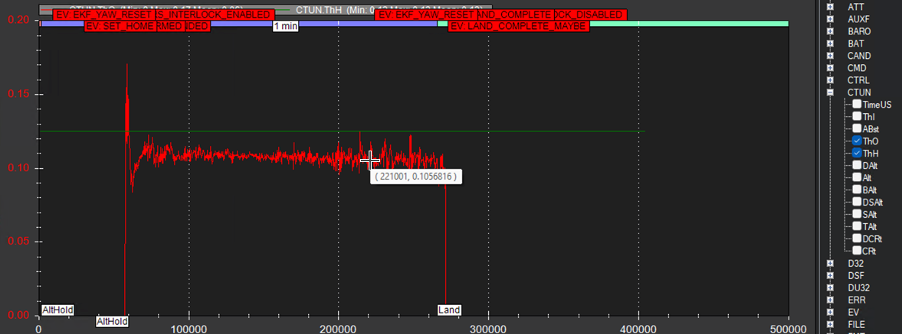
• Determined Mot_Thst_Hover (2023-05-26 12-23-07)
• Set PSC_ACCZ_P = 0.105 (showed out of range)
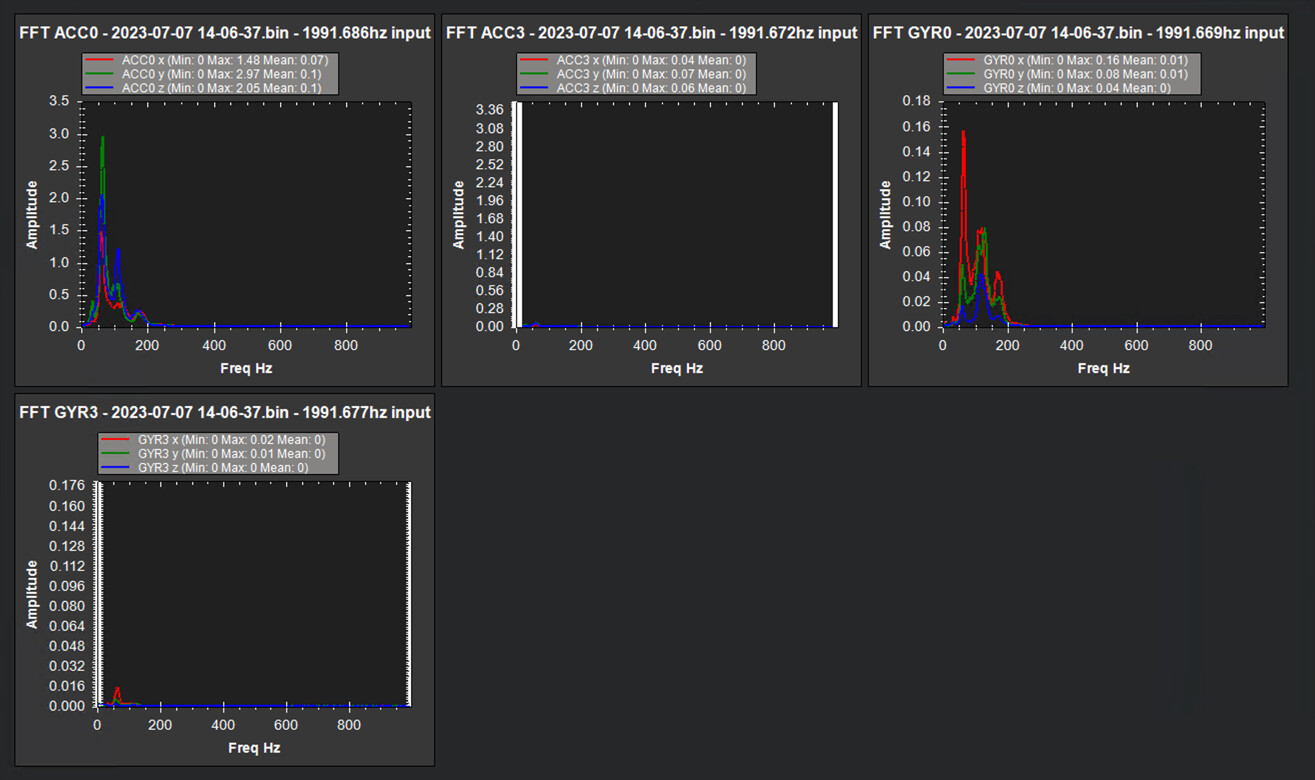
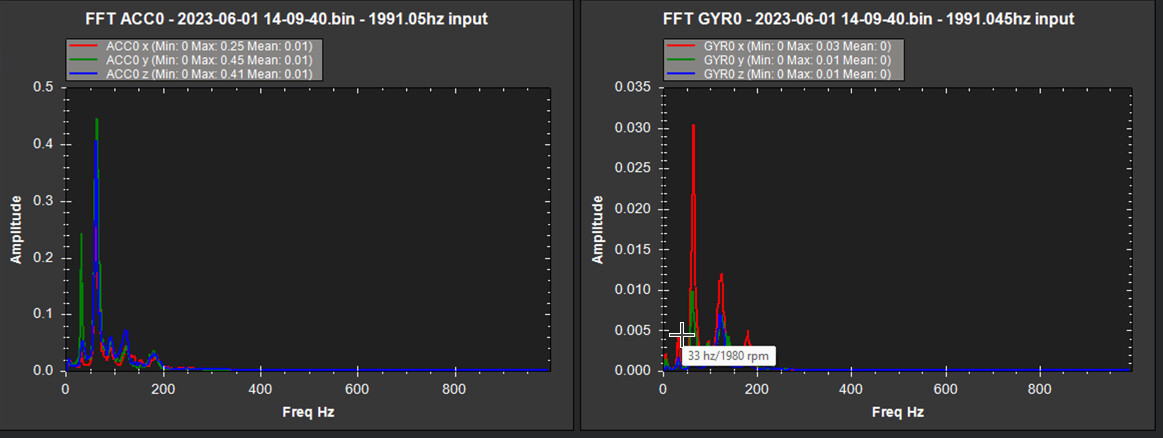
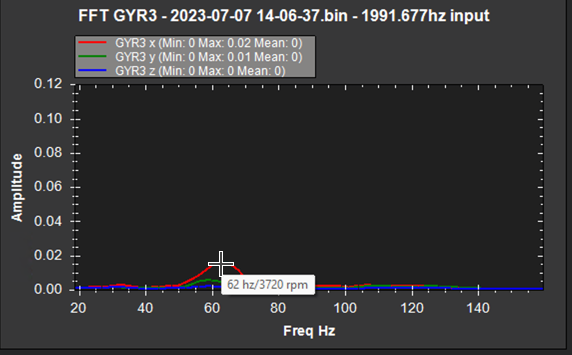
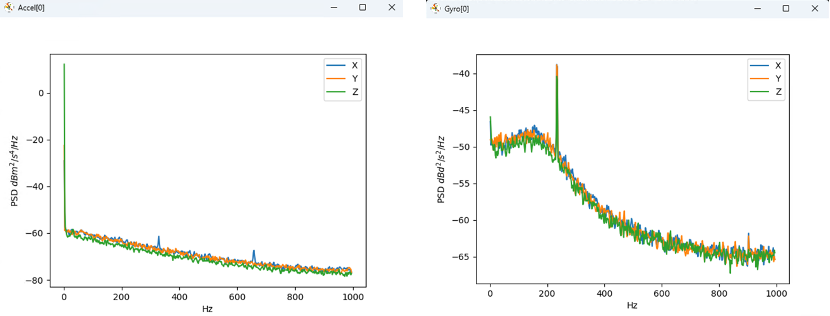
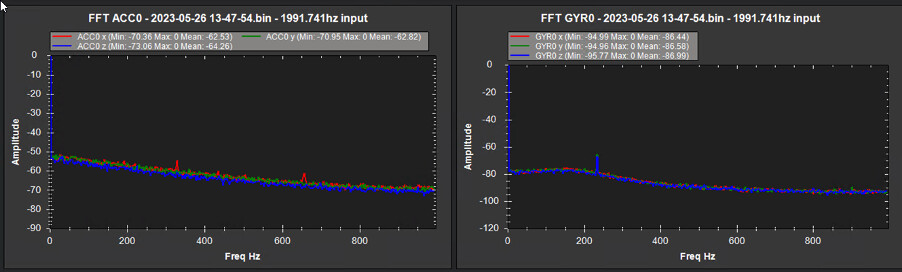
• INS_LOG_BAT_MASK for FFT Logging (captured) 30s hover ALTHOLD (2023-05-26 13-47-54.bin)
• Completed Manual Tuning section with Transmitter-based approach which appeared straightforward.
• Progressed to Autotune
Had a few fails initially saving. One instance was the low batt failsafe kicked in and aborted the Autotune and another I hadn’t understood the procedure clearly in terms of landing in Autotune and disarming to save.
• Roll Axis = 0 (2023-06-15 12-50-32)
• Pitch Axis = 1 (2023-06-16 11-49-08)
o Pitch Took 2 attempts but was completed successfully after 2nd.
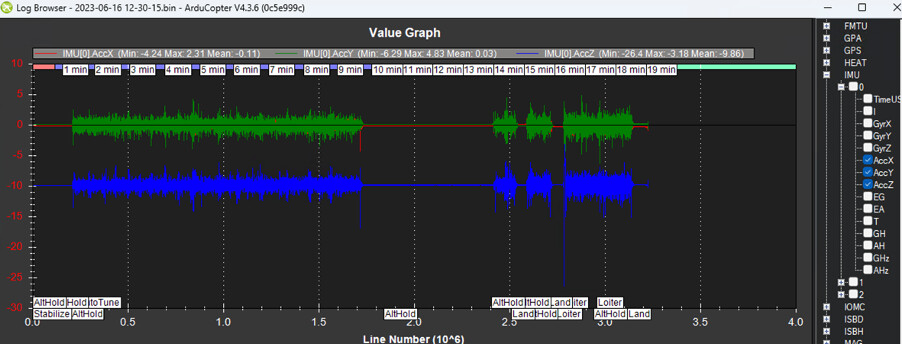
• Yaw Axis = 2 (2023-06-16 12-30-15)
Logs https://ipgbuzz-my.sharepoint.com/:f:/g/personal/anthony_ipg_buzz/EkM1IKS3Hz5Go9x54Vh8h_kBq5e5HLypMttPzlF_TZi3kA?e=bpun4M (public URL)
Bit of an issue with Yaw which I ended up having to revert.
I actually checked both tick boxes for Yaw & YawD by mistake.
The Autotune still however completed after a few attempts.
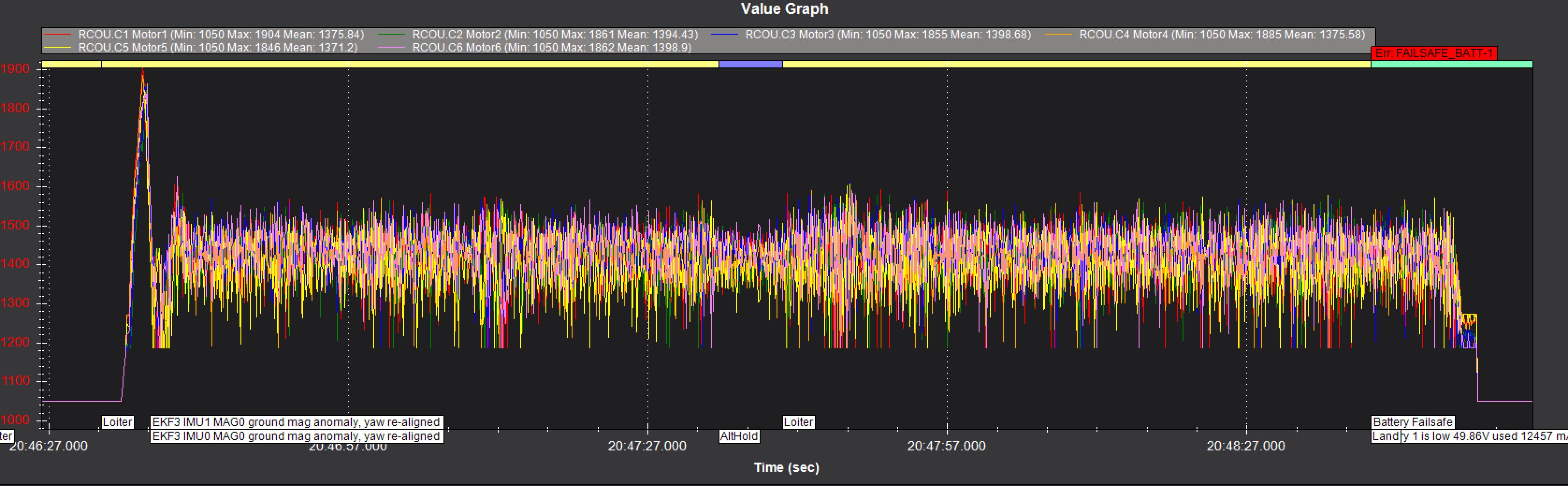
I had a little fly back to the landing point in ALTHOLD, and it seemed ok so I thought I’d carefully try in Loiter about 3m AGL
What happened next was unexpected. It started to shimmy i.e. Oscillate quite significantly and I caught it on video.
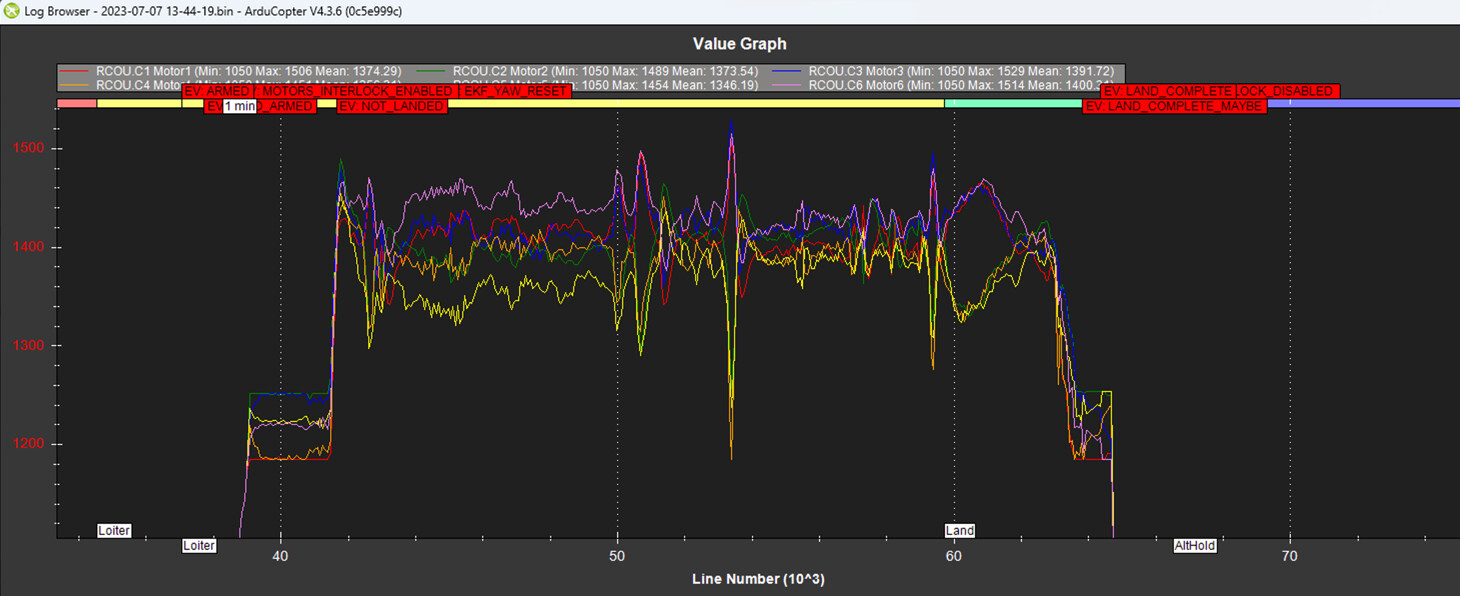
I decided to complete 2 additional test flights.
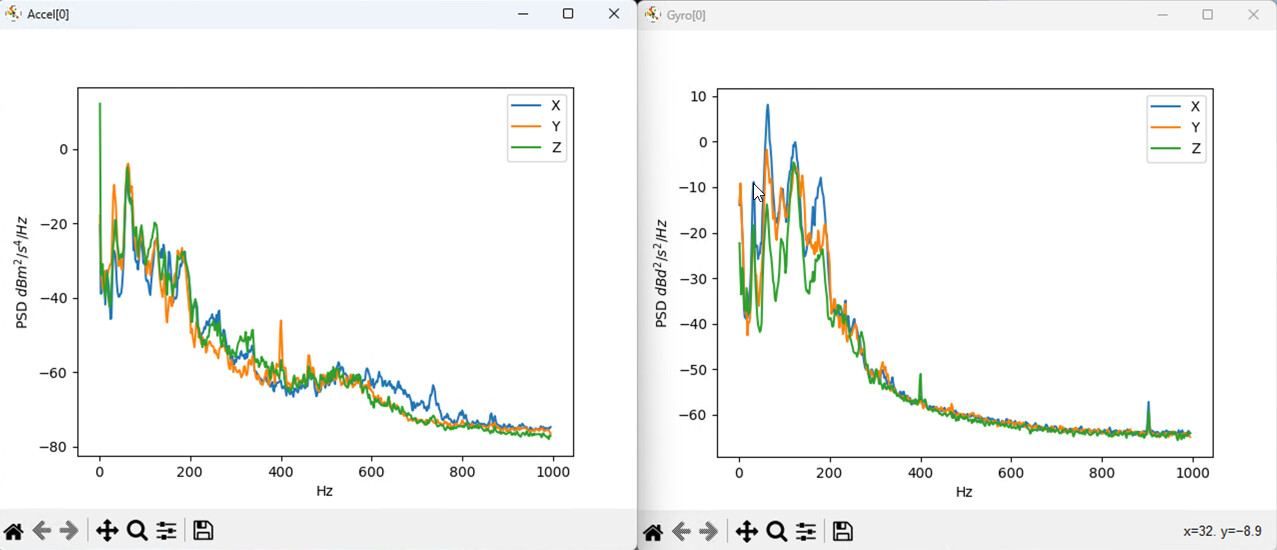
I’ve had a look at IMU vibration data and it looked relatively ok?
I wasn’t sure if checking both Yaw/YawD caused the issue so I rolled back the changes and ran Yaw exclusively but the Oscillations still exist visibly in Loiter.
• Yaw Axis = 2 (2023-06-29 12-27-19) 2 weeks lost due to bad weather.
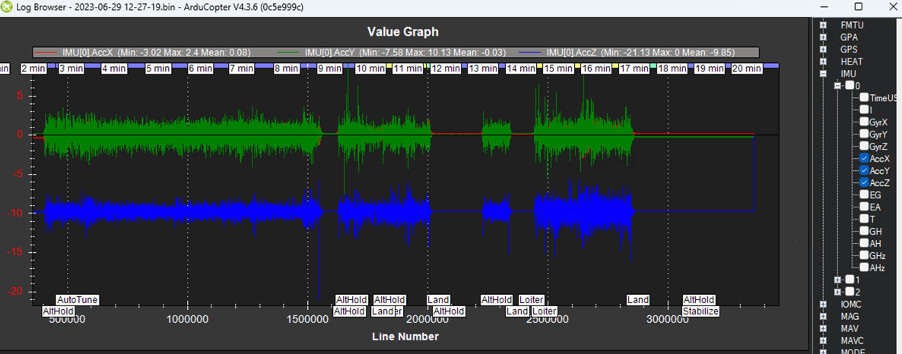
Vibrations definitely look a little more erratic to me, but it’s funny when you drop back to ALTHOLD the oscillations appear to reduce dramatically.
I ran Autotune at the recommended Autotune_Aggr 0.1 with barely any wind.
I would really value your feedback on what I could try to reduce the oscillation and maybe improve the general feedback of the drone so it’s smoother without compromising responsiveness.
Cheers Anthony