Hi Mike,
Thanks for taking your time to help me!
What software do you use to plot the graphs? I use mission planner to see the log but yours seems to show more information.
Powerful copter not tuned.
Have you done an autotune?
I tried to do autotune but the two batteries I have are 3s 3000mAh and they run out before autotune finishes. I need to buy a little bigger battery.I know tunning is necessary but I do not think such a big instability is just because it is not tuned. Do you think so?
Seems unbalanced or you were flying in strong winds.
How can I know if it is unbalanced? Do you mean the motors or the weight distribution on the quad? The GoPro camera was on the quad nose, so weight distribution was not good, but this problem also occurs without the camera.
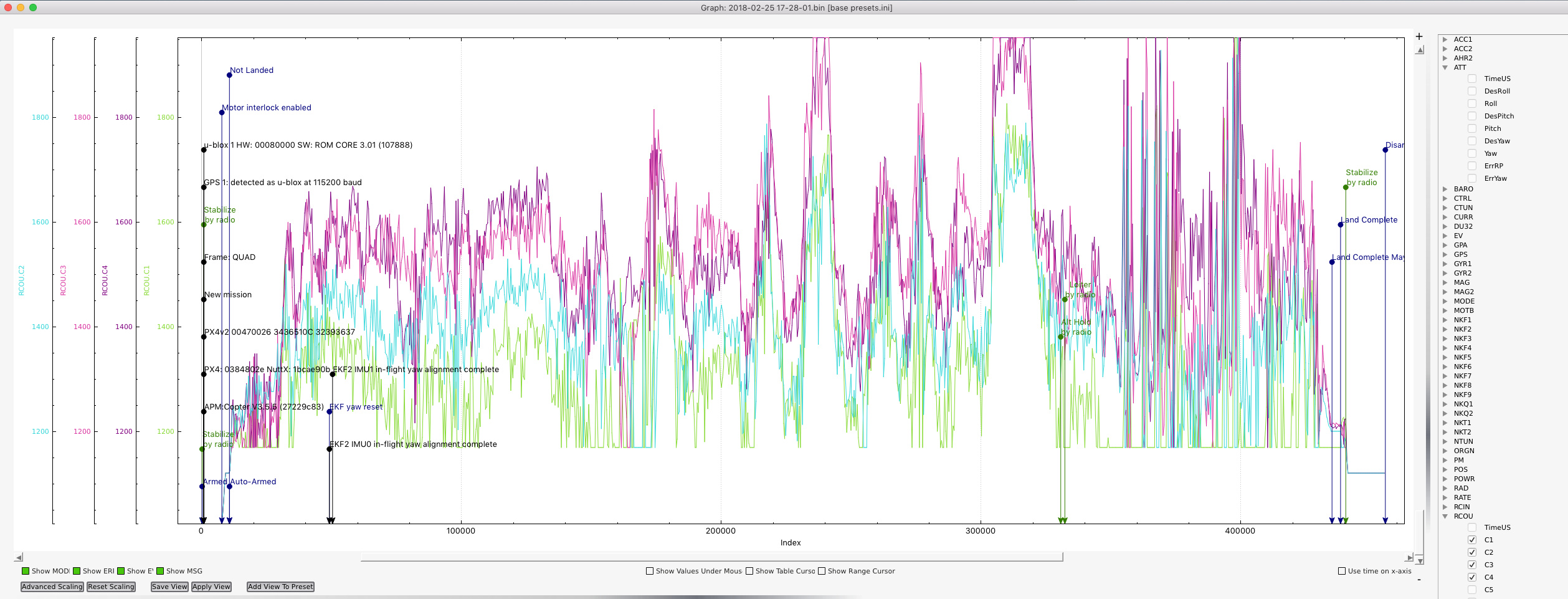
Motors 1 and 2 are working much less than 3 and 4.
Do you have the correct props on?
Are the arms bending?
Are the motors straight.
Effectively, motors 1 and 2 are working much less, and according to this diagram, this is not because of the weight of the GoPro camera, because they are not both on the tail of the quad. I have no idea why it is caused.
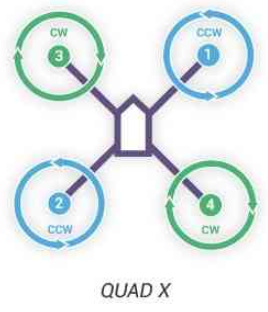
I’m using the same 1045 props on all motors, CCW for 1 and 2, and CW for 3 and 4. Visually arms are not bended and motors are straight. Frame is not DJI original, is an aliexpress clone, but it looks good.
Could it be a problem with a motor or an ESC, which is not given the same power as all the other motors? How could I test it?
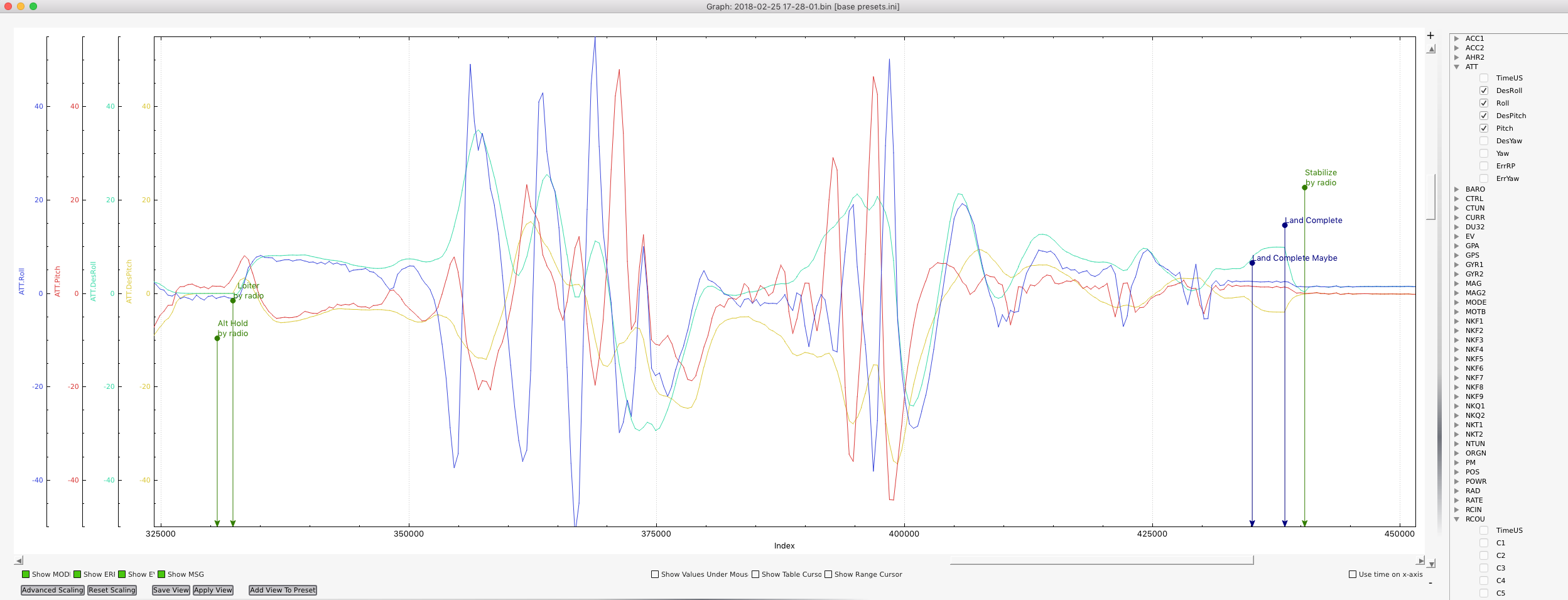
There is definitely an anomaly happening as you can see here when roll diverges from DesRoll.
That’s absolutely true! Could it be a motor or ESC does not respond to its input?
Do you have bullet connectors on the motors?
Are they firm and making good contact?
They are soldered with tin and solder is good, no cold solder at all.
Thanks again for your help!