RALLY_LIMIT_KM is the maximum distance a Rally Point may be from the aircraft to be considered for an RTL event. If all Rally Points are greater than this distance from the aircraft, then the Home location is used for RTL events (at altitude ALT_HOLD_RTL) unless Home is farther away than the nearest Rally Point – in which case the nearest Rally point is used. This parameter is to prevent fly offs if Rally Points have been specified for multiple flying fields. This parameter can be disabled if set to 0.
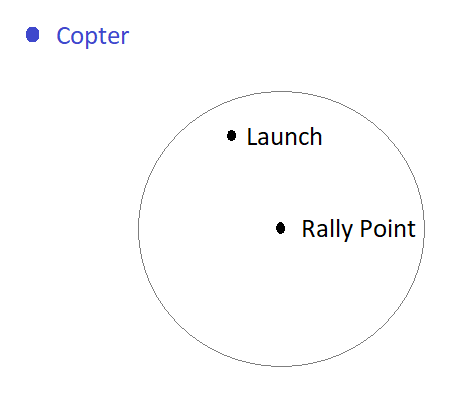
Ok, so let’s say I set the rally point near the launch point and the RALLY_LIMIT_KM covers the launch point.
Then I trigger RTL having my copter as shown below. The copter is outside the rally point area at this moment. Also the LAUNCH is closer. So it starts going to LAUNCH. Then some time later copter enters the rally point area. At that time copter is very close to LAUNCH.
So the question is - will copter re-target to a rally point when entered its area or will continue RTL to LAUNCH?
If my memory serves me better the Rally point works hand in hand with GPS marked home location.
If you loose rx signal the fail safe will kick in and plane will come back to Rally point. Or if home location can be identified it will come back home location.
I could be totally wrong…i will check it for you or others may chime in.
p.s. " You can set the position and altitude of a Rally Point at various places in the mission plan . Then if there is a Fail Safe, the plane will go to the nearest RP or Home, whichever is closer"
This is very first use case described in RallyPoint documentation:
there are often cases when RTL can be undesirable. For example it may be an area full of people or property and a system running in RTL mode may very likely be in a state that merits extreme caution!
So that’s my case and I want copter never to return to LAUNCH, but always to rally point that has appropriate RALLY_LIMIT_KM value to cover LAUNCH point (as in my picture).
You would think that all you would have to do is set RALLY_INCL_HOME to 0 but in the MP Simulator it still returns to launch under the circumstance you posted. This is a good test case for the Simulator. Further investigation required I think.
OK, If you set RALLY_LIMIT_KM to 0 and RALLY_INCL_HOME to 0 it will do what you want. Test it.
First of all never fly drone above the people its against the law and I am serious about it. Always fly a drone at designated flying fields unless you have Part 107 license and have clearance to fly in public places. Google, many got tickets, fines list goes on. Yes I am scaring you on purpose…
Armchair lawyering in a technical thread just doesn’t belong. Perhaps Sergey could care less what the FAA (a US Government agency) has to say? You could post that content in Rants & Raves and possibly get an audience.
I disagree. If educating the masses Is Arm chair lawyering then next time grab a screw driver and show up to fix other people drones…not sure why you have pick on my comments time to time…strange…
Well thanks, I wasn’t aware of the RALLY_INCL_HOME setting at all. And yes, reading its description I would think so.
So this looks like a bug, if RALLY_INCL_HOME=0 still allows use home point for RTL. I need to test that.
yes, I believe that will work as a workaround. But setting RALLY_LIMIT_KM=0 is a bad idea I believe because it will lead to a fly away if RTL will be triggered on another distant fly site.
@UAVSkies sorry I don’t get your references to FAA, I’m not in US. I even didn’t say I’m flying above people. My case is that I launch and land manually near the tall trees. So in case of any RC failure I don’t want my copter to return and land at the tree.
You mean I need to set a corresponding rally point every time I fly in a different fly site. Otherwise, if RTL trigger - copter will returns to a distans RP (because of RALLY_LIMIT_KM = 0) - and this will mean a flyaway.
Unfortunately this way brings more inconsistencies than benefits, as to me. For me as for a hobbyist, it’s overhead to take a notebook for every new location to configure correct PRs before fly.
If RALLY_INCL_HOME is set to zero I believe that is the case. I’ll test it in the Simulator but by description I would assume so.
Indeed this is what happens. It will happily fly to the nearest Rally Point saved regardless of how far away it is. So to use the feature in this way you would have to delete all Rally points when moving to a new flight location and save new ones appropriate for that location. It’s not what you are asking but you could use a Waypoint and Land command to end the mission. In fact this is what I almost always do rather than end it with an RTL. That started with one-way missions but I have carried it over to use most of the time.