Hi All
Can you use radio stick commands to do some configurations using OSD like in Inav or Betaflight ?
thanks
Hi All
Can you use radio stick commands to do some configurations using OSD like in Inav or Betaflight ?
thanks
Have a look at the documentation. Depending on which OSD board you use, stick commands are supported.
https://ardupilot.org/copter/docs/common-osd-boards-on-screen-display.html
thanks for the link. I’m new here and still getting use to finding things on the site,. None of the searches I did found the link you sent me.
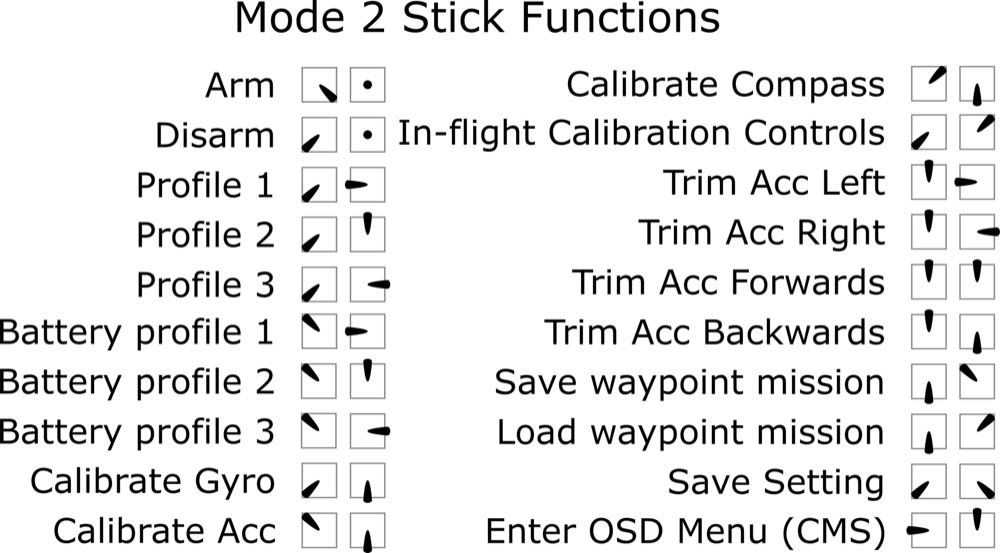
I read it all but still not clear how to actually access the parameter tweaking via OSD. Do you apply the same stick commands used in Inav , BF , etc like in the pic attached.?
Most of those stick commands are not the default behavior for ArduPilot. Arm/Disarm are the same, and that’s about it.
The stick commands for OSD control will be dependent on the OSD you are using. I have not used the native/onboard OSD, but it appears to me that you would use an RC channel for screen switching and then the RC sticks for menu navigation on screens that allow it (while disarmed).
I use a Minim OSD on my own copter which allows for menu entry while disarmed by holding throttle-mid, yaw-right, pitch-full.
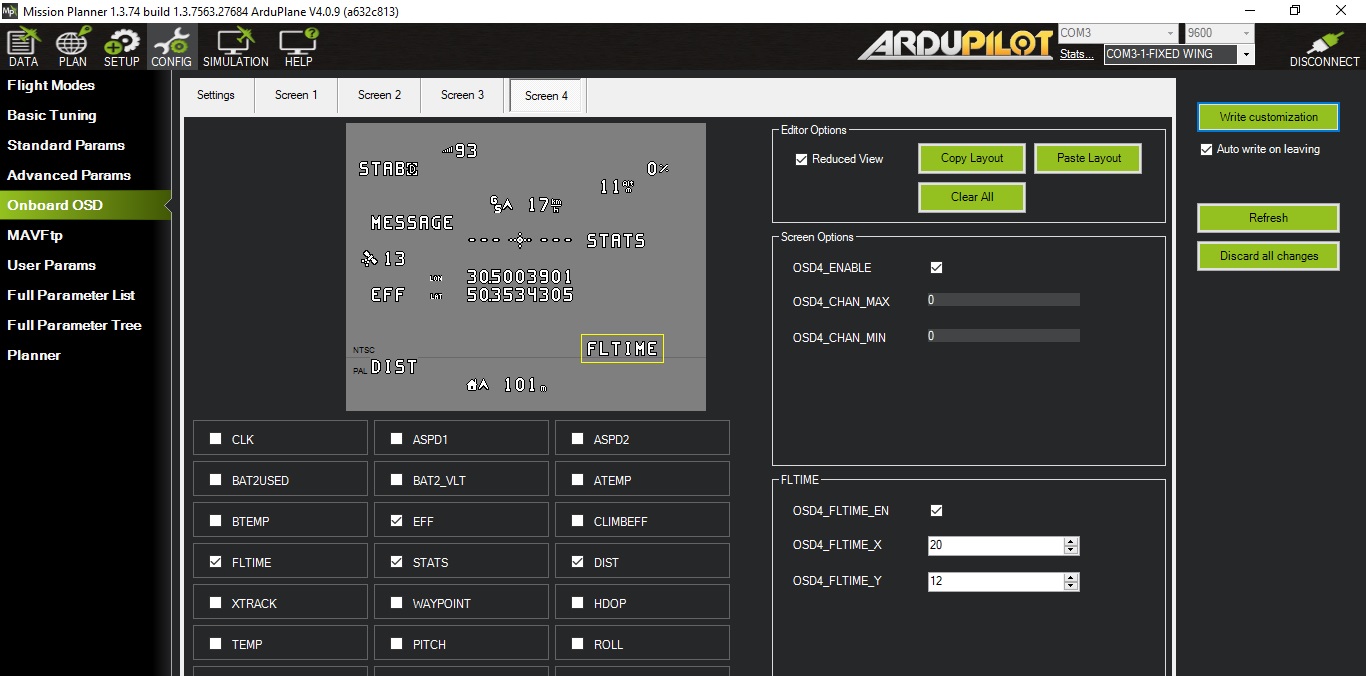
oh that makes sense. cause I’m using matek F405 FC with onboard OSD and thats may be why throttle-mid , yaw -right doesn’t work for menu entry! So I guess I have to use RC channel for screen switching and also set OSD5_ENABLE and OSD6_ENABLE = 1.
And you need to use ArduCopter 4.1
Im using ardu plane and will it work on plane ? and its 4.1.2 version
Yes it will work - anything 4.1
unfortunately I only get up to OSD 4 . OSD 5 and OSD 6 are not in the full parameter list at all. Must be something to do with F405-wing firmware or onboard OSD on F405 does not support OSD 5 and OSD 6 ?
OSD5_ENABLE not there? If you are using 4.1 should be there
you are right!..oh…my fault…its 4.0.9 version. I thought I had 4.1. will upgrade and see .
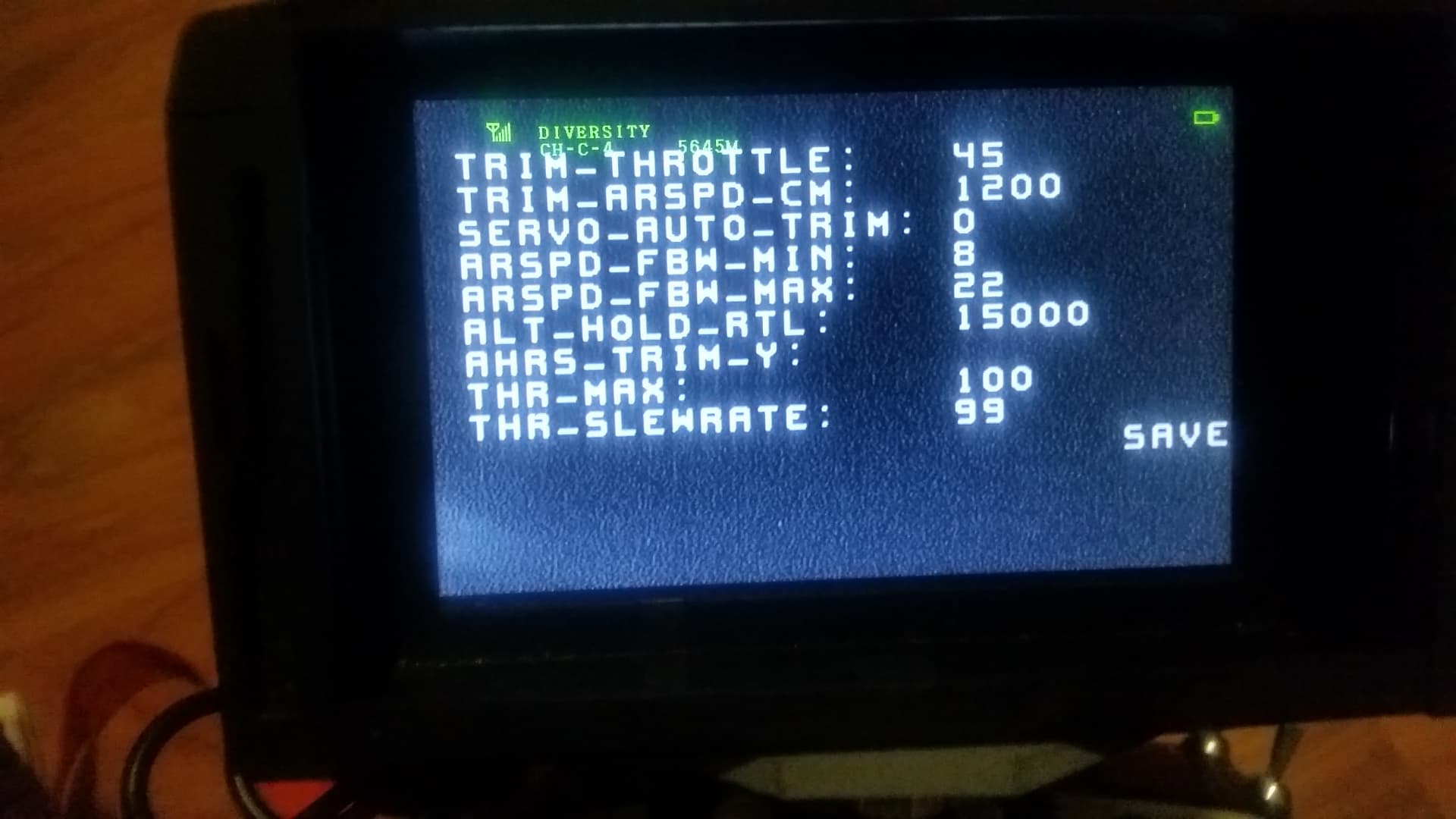
I upgraded the firmware and now I can enable OSD5 and OSD6 and I can get the sticks on the radio to configure some settings on FC via OSD! This is great as I dont need to carry my laptop to the field anymore! Thanks for your help!
Since I have upgraded the firmware , do I need to recalibrate gyros and go through mandatory hardware check ?
You shouldn’t need to change anything - all the parameters should get upgraded