-
by “disable telemetry” do you mean simply turning off the script on the taranis, or do I need to turn it off on the FC? And if I need to disable on the FC, what’s the easiest way to do just that and only that, with minimal modification of other rc parameters etc? I remember the setup involving a handful of parameters in different places; can I just change the RC_OPTIONS bitmap and leave everything else alone?
-
I don’t know what a DMA-enabled port is. What does DMA stand for? For the receiver connections, I have CRSF TX/RX wired to Serial 1 and MAVlink TX/RX wired to Serial 2, and I have “RC by MAVlink” turned on.
Turn off the passthrough bit on RC_OPTIONS - so subtract 256 from whatever you have now
Ok, so CRSF provides radio control so there is no need for RC by mavlink and that may be causing issues - turn this off.
You can determine DMA by using mavproxy - from within mavproxy run
ftp get @SYS/dma.txt -
and post the output. UARTS with DMA enabled have a * in the output.
You should be able to load the beta using MP’s beta firmwares link. If this doesn’t work (i.e. the binary loads but the board doesn’t boot or fly) then we have even more serious problems. Can you try loading this version and report back, thanks for all your testing!
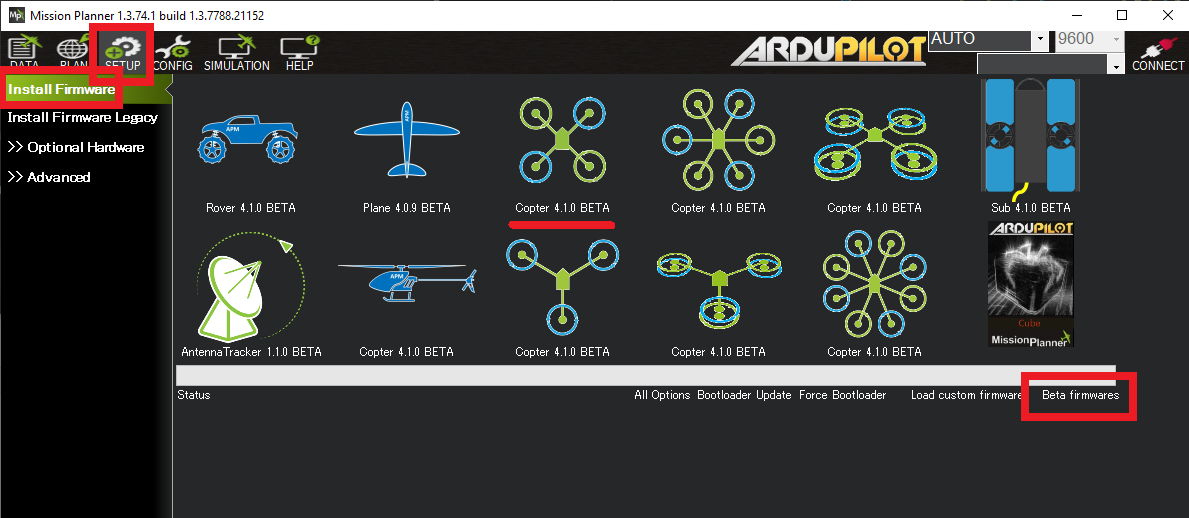
Okay, 1 step forward, 4 steps back. I made one change: I loaded “4.1.0-beta1” through mission planner. MP tells me it’s build a47823a5. MP gives me no other options about selecting a FW version for beta that I can see. I expected to be prompted regarding what particular build I wanted, but not so much.
I flew one flight.
Now:
-I have no telemetry back to Taranis
-I have no OSD on the DJI FPV goggles
-it felt like it was flying differently, as if it was no longer tuned (though it was a short flight, I was tentative without the tele feedback to which I have grown accustomed)
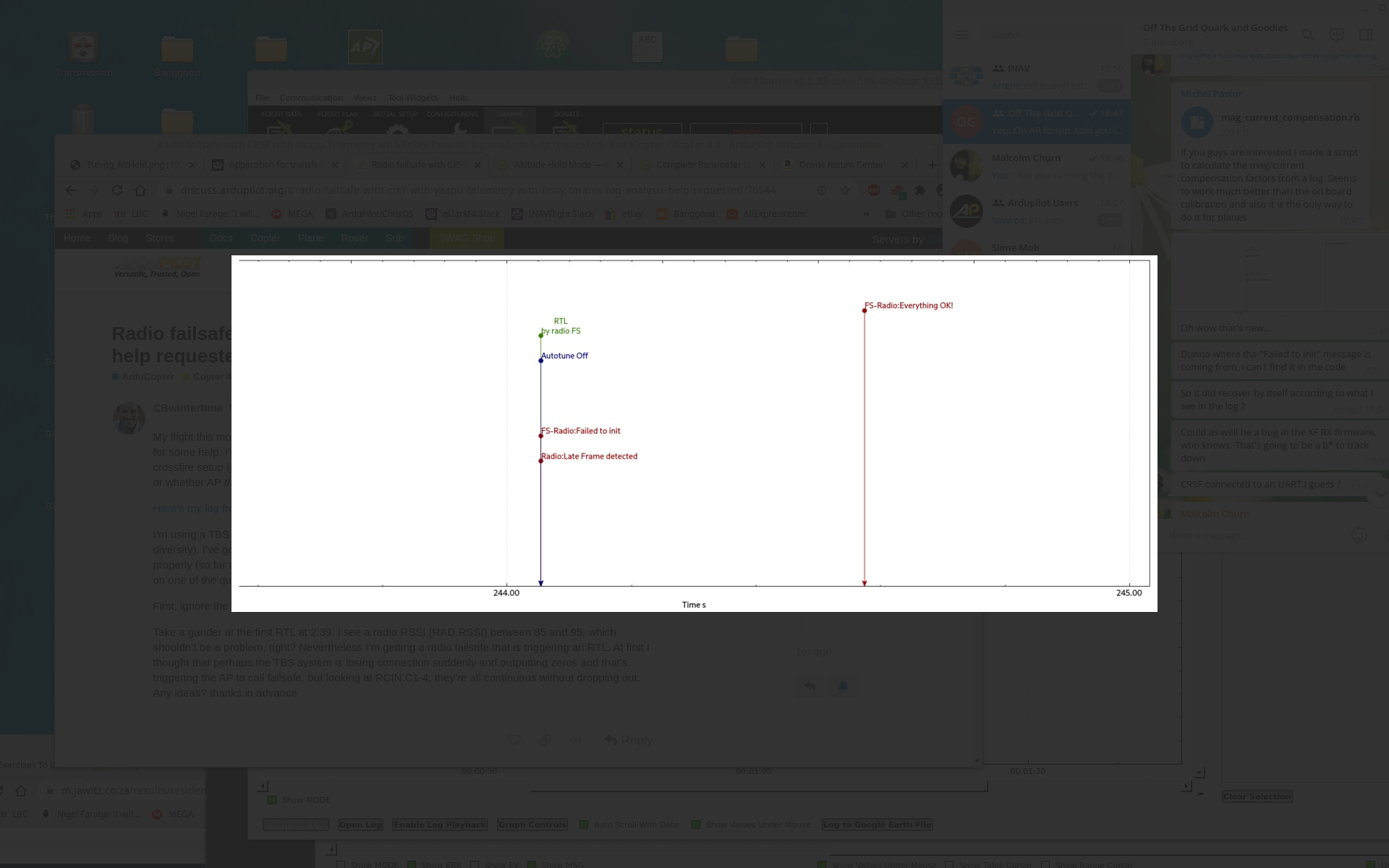
-Still experiencing failsafe
-the fields logged to flash are different; I’m missing the entire “RAD” category
Now that we’re starting from a known FW, here are my parameters file and my log from that single short flight.
Any other information anyone would like?
after upgrading FW, do I need to re-calibrate anything? why would it fly differently after a FW upgrade? I compared the before/after params and this is all I get:
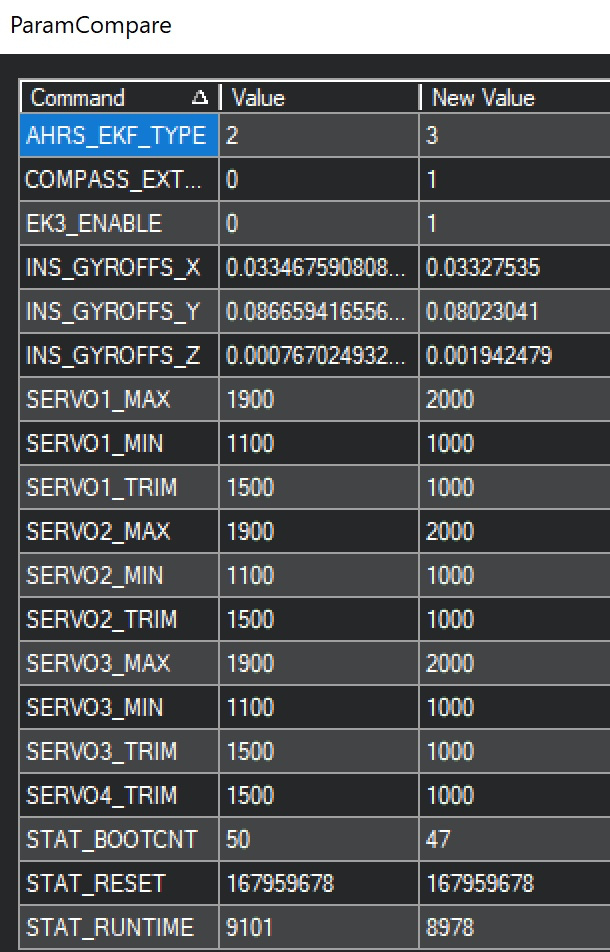
Left column are the parameters after FW upgrade; right column are the parameters just before FW upgrade. what’s with the differences in the params file?
Am I missing something basic regarding necessary actions to perform post-FW change? Because I can’t account for all the differences now, with only upgrading FW. thanks for the help
EDIT: I’m running “Yaapu X9 Telemetry Script 1.9.1 beta1” on the taranis, with CRSF enabled.
Same on One of the Quads we were Testing today - It’s not Cross Fire
You shouldn’t get those kind of parameter changes but the version you have loaded is correct. What flight controller is this?
Kakute F7 V1.5 (NON-aio version)
Are you sure its not the RHS that are the new values?
Yes I had the new ones loaded into MP and then I “compared” with the old file, so the old file shows up on the RHS. I wondered this myself so I opened the new params file (the one to which I linked) and it correlated with the LHS.
Oh I see the problem, this board has minimize features set. Let me do a PR for that
I’m afraid you will have to use latest master for now … and that won’t work either.
I’m afraid that this board is so tight on flash that you won’t be able to use these features unless you build the firmware yourself.
help me learn if you could–what is a PR and by latest master do you mean the dev or the stable, back at 4.0-something?
PR s a pull request - but I am afraid you are out of luck until we have a custom build server
ok so I have two issues:
- my Kakute F7 V1.5 has 1Mb flash and so I can’t load the current beta version
- there seem to be issues with the CRSF losing connection, unrelated to my limited board (because others report similar or identical issues with varying FCs)
Maybe it’s time for me to learn how to do my own custom builds–I’ll put that somewhere on my (unfortunately lengthy) to-do list.
Or, maybe I’ll go to a different FC with 2Mb flash to sidestep that particular issue, trying to keep everything else marginally the same so I don’t lose my mind trying to get this setup up and running. Maybe I’ll try the Matek H743-SLIM.
thanks for helping me figure out the FW issue
I take it 4.1.0-DEV lacks the CRSF tele passthrough functionality at the moment?
It occurs to me that I should perhaps try an even earlier FW to see if the crossfire failsafes continue, like the stable 4.0.7. I’ll try that next, as a troubleshooting step, and just deal with the lack of telemetry long enough to collect a failsafe (or not, hopefully).
CRSF is only supported on 4.1 and is compiled out on the KakuteF7 anyway - I recommend you upgrade to a different board if you can as that one is at the very bottom of the pile in terms of features. The Matek board is a good choice
ok sounds good I’m going to get the Matek H743-SLIM, keep everything else as much the same as I can, and report back here after I’m up and running again.
wait, one more thing to clarify: when you say “CRSF is only supported on 4.1” you mean the CRSF pass-through telemetry, correct? CRSF rc protocol still works on earlier versions (e.g. 4.0) right?
No, CRSF support is new to 4.1. In 4.0 you would need to use SBUS or mavlink RC.
tentatively good news. It may have been the “RC over mavlink” setting on the crossfire setup, as @andyp1per suggested.
Reminder on my last attempt I had updated to latest beta FW but that build strips out the CRSF for my 1mb Kakute, so I didn’t get out of the gate on that one.
This attempt I reverted to the custom stripped-down build that @yaapu provided for me in january over on this thread. I know that version is a bit dated now but I lack the ability to build my own from the latest beta. Reverting to that FW got me back to my known state of experiencing radio failsafes.
Then I made a single other change: I disabled the “RC over mavlink” option on the crossfire. I did a really short test flight this morning in heavy wind and got no radio failsafes. I’m not fully convinced yet so I’ll try again when the wind dies down and report back with a definitive answer. I’m enthused enough to post about it though.