okay, I have more data and I’m even more confused. I did a nice clean flight this morning with one radio failsafe for easier analysis (if only).
The onboard flash log RSSI information seems disconnected from anything sensible. I am pasting below both the onboard flash log and my taranis telemetry log (which has more sensible RSSI quantities).
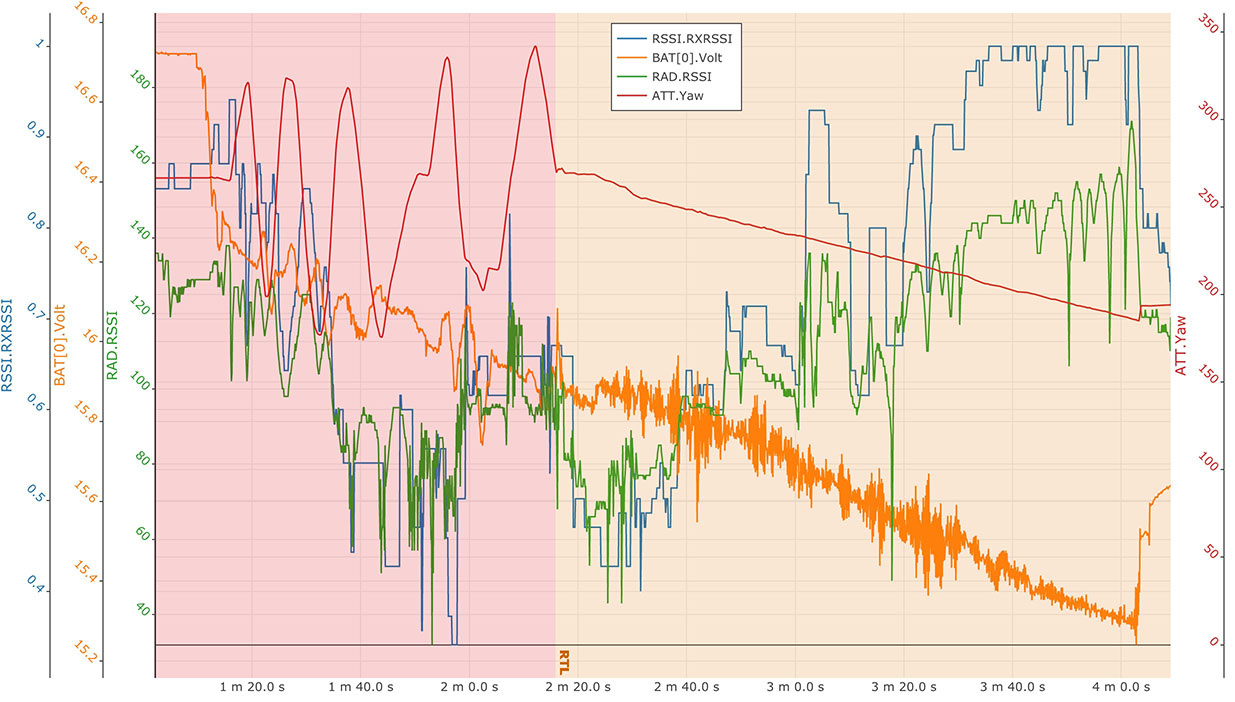
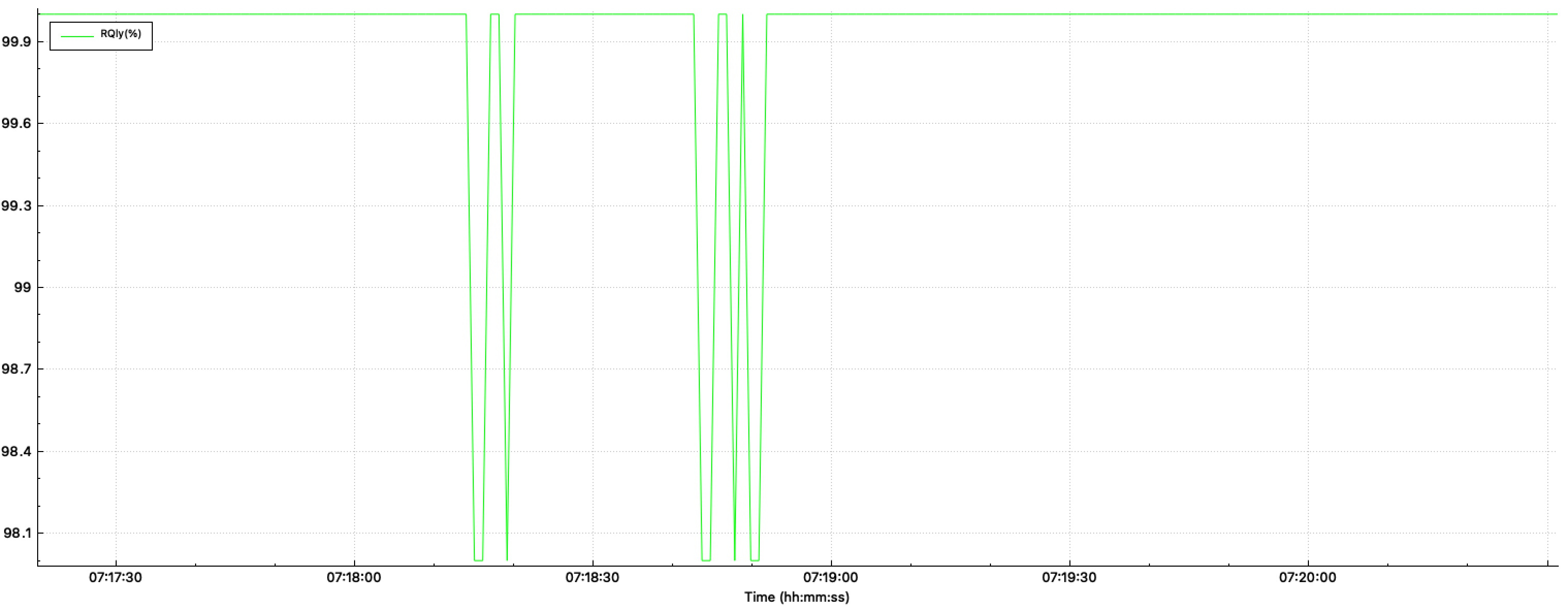
The link quality logged by the Taranis never goes lower than 80, on either the TQly or RQly (note it’s only logged at 1Hz, so a spike would be missed). The RSSI.RXRSSI value logged to FC flash goes from 99 to 0.34 and the RAD.RSSI goes between 170 and 35. What do those numbers mean? Not only do units seem incorrect, but it also doesn’t seem to correlate with any of the curves recorded by the Taranis. I’m very curious where the FC is getting those numbers. I have my parameter set to RSSI_TYPE, 3 which is what I thought would successfully interpret the CSRF rssi data from the telemetry stream to the FC (without needing it explicitly sent over a separate RC channel).
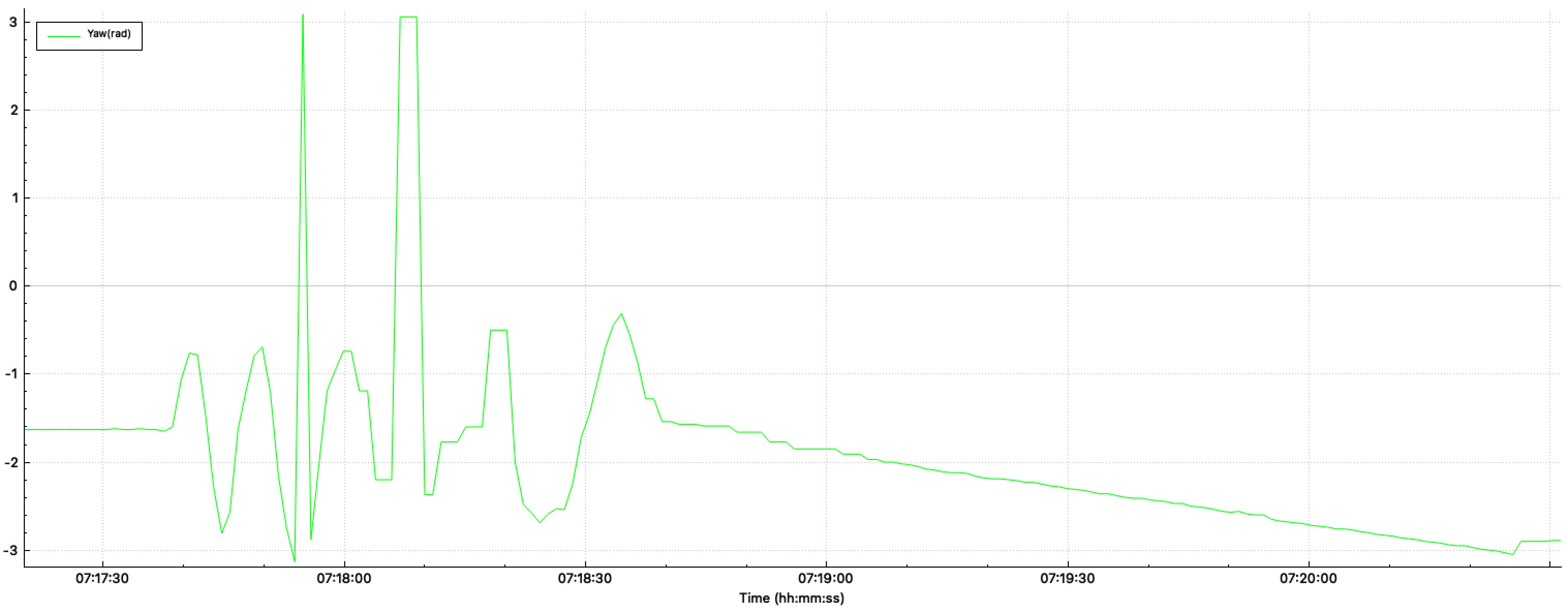
Aside: for correlating the two different logs I used the yaw data, as it’s clear where the failsafe happens (the yaw goes linear during the RTL). Is there a time-of-day stamp recorded anywhere on the onboard log that could be better used for this purpose? I had a hell of a time trying to find the same section of data on the Taranis log as the FC log.
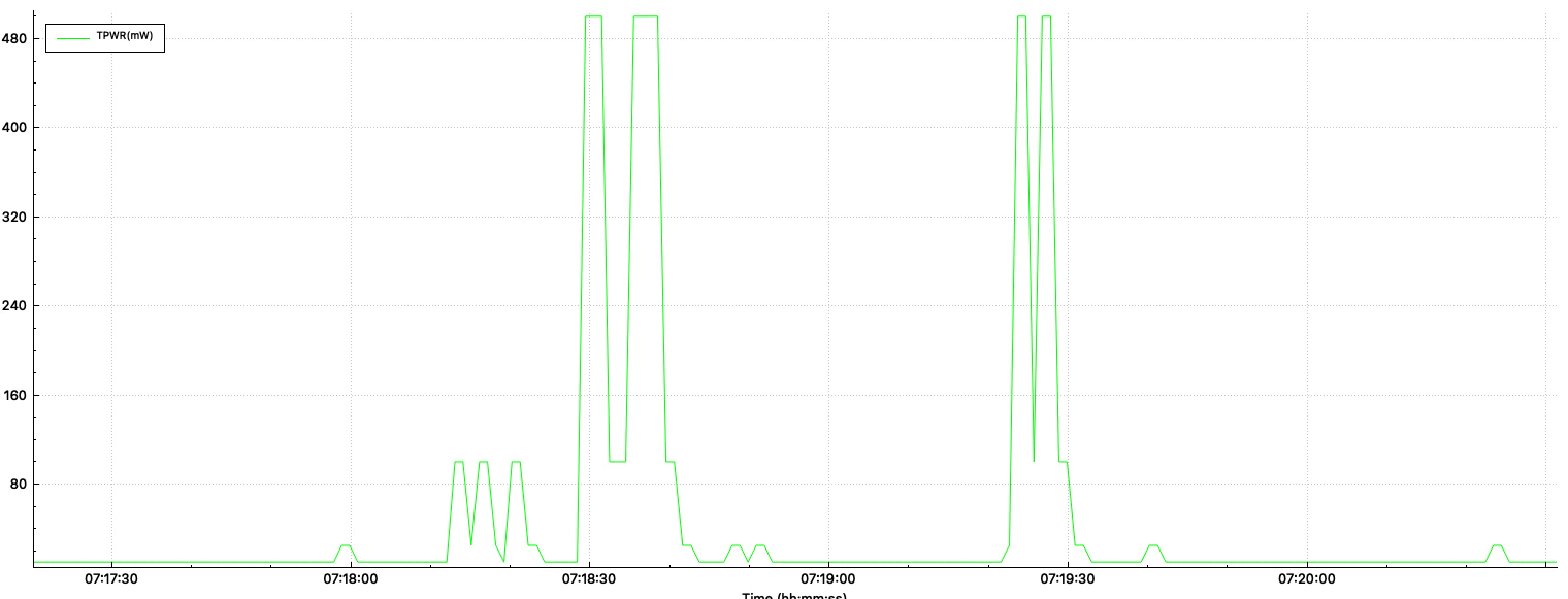
Even without understanding the RSSI values that were logged, I still can’t find a reason for the failsafe that happens. The one thing I do see is that the TBS tx jumped up to max power output (500mW) right at the failsafe. It did this despite not seeing any problems with LQ or RSSI. It switched between mode 2 and 1 a bit which is fine, but never went to 0. So why did the TX decide it needed 500mW all of a sudden? And why wasn’t that reflected anywhere in the LQ?
I’m so confused. Am I losing all connection for a few seconds when it switches from mode 2 to mode 1? There’s a chicken/egg problem here, where my telemetry coming to the taranis is not going to be accurate if the connection is dropped, so I don’t know which data if any to trust here.
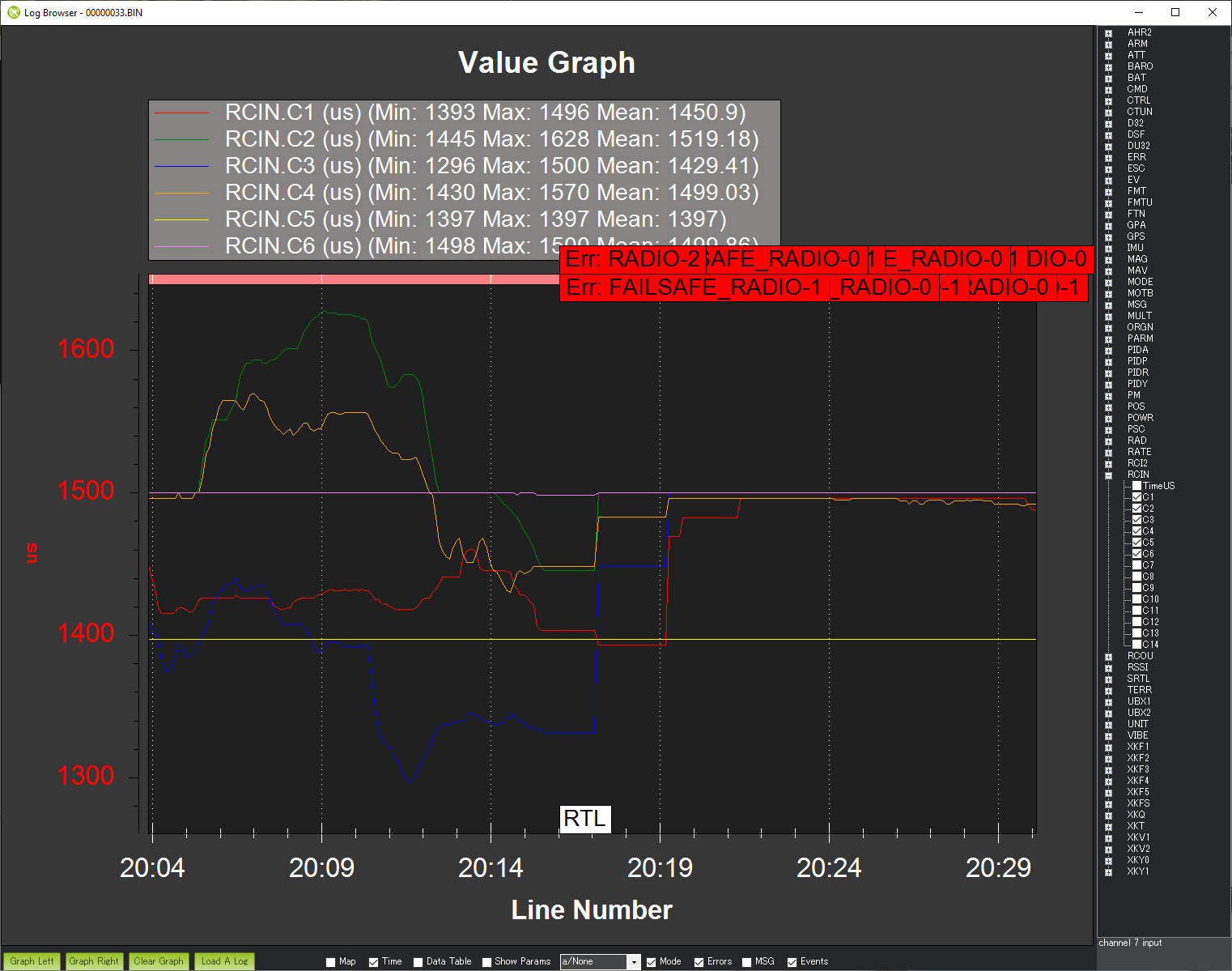
To reiterate, my RCin signals never “cut” in a way to trigger the failsafe (that I see). So I still don’t know whether the TBS is triggering the FS on it’s end, or the autopilot is triggering it on the drone side. Could the power to the RX be glitching? If the RX lost power, the autopilot would register a FS, possibly when the TBS tx wouldn’t notice it, right?
my FC log
logs from the CRSF telemetry back to the Taranis:
yaw (for lining up the timing)
TPWR
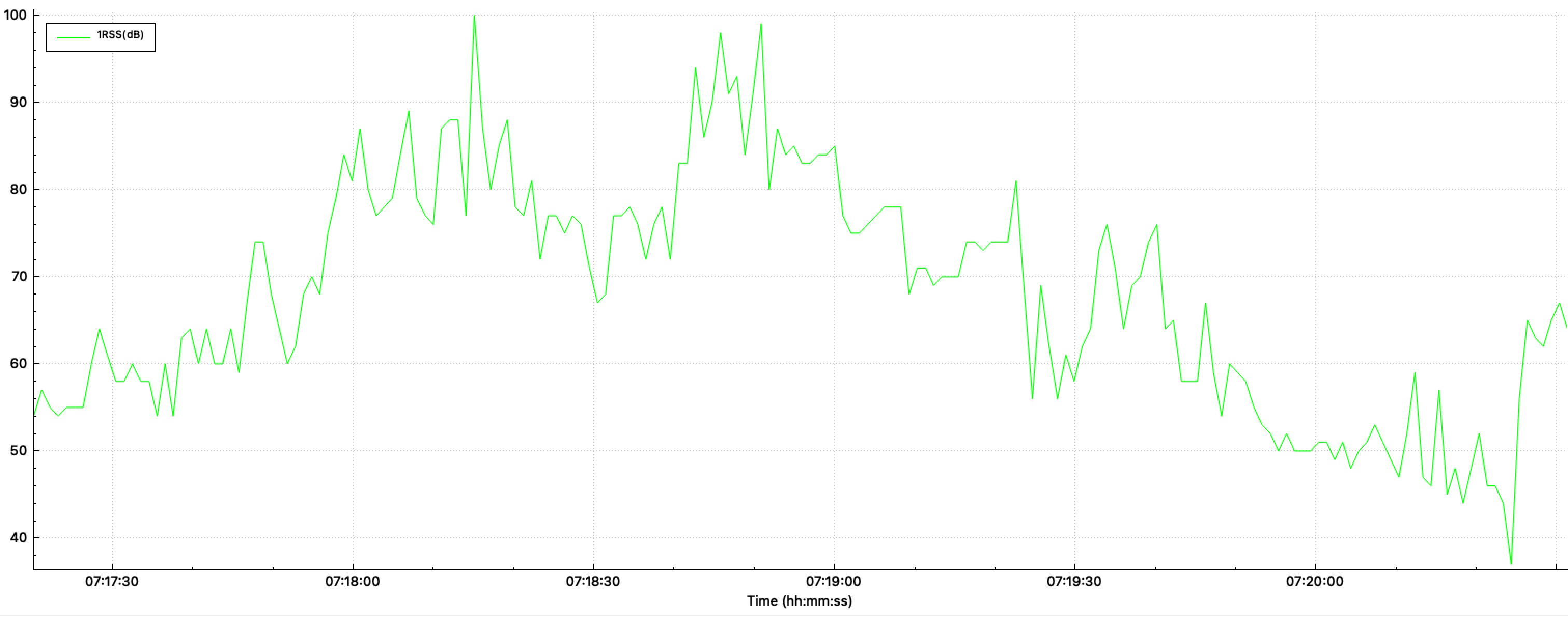
RQly with sensible values
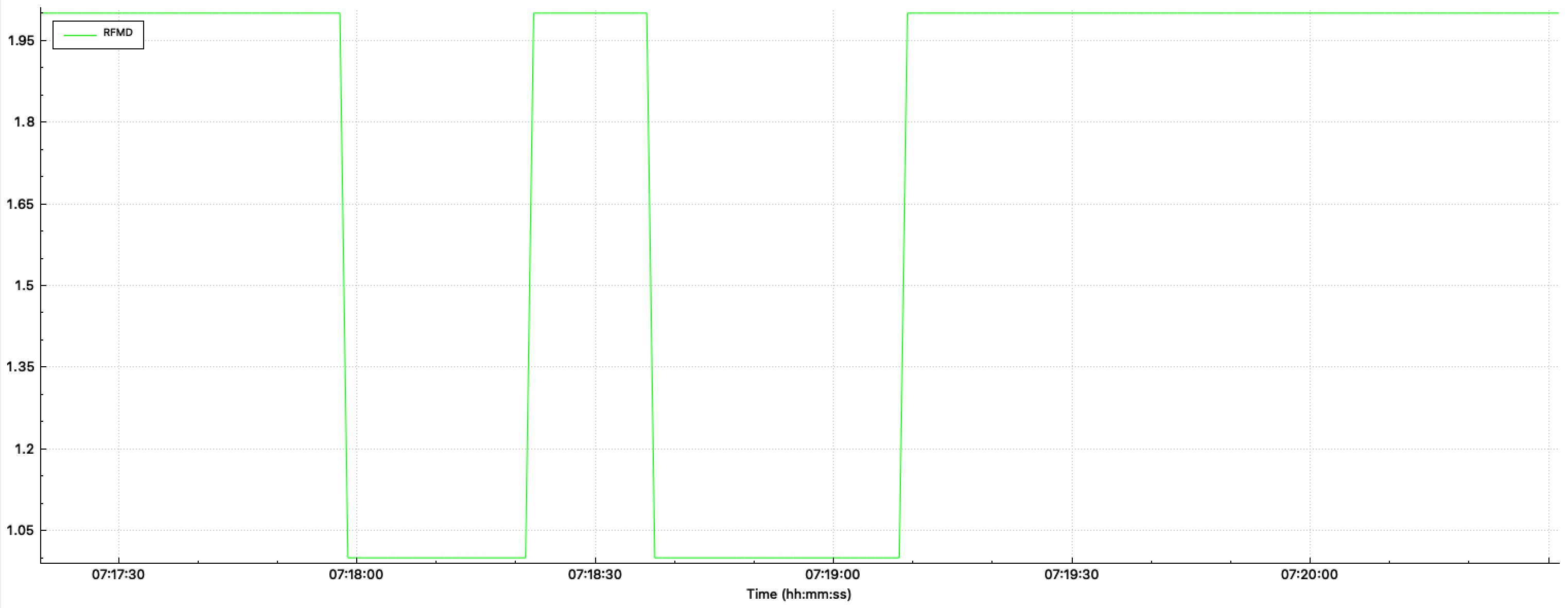
RFMD (crossfire mode, going from 2 to 1 but never 0)