https://discuss.ardupilot.org/t/rover-boat-quiktune-alpha-testers-wanted/101989
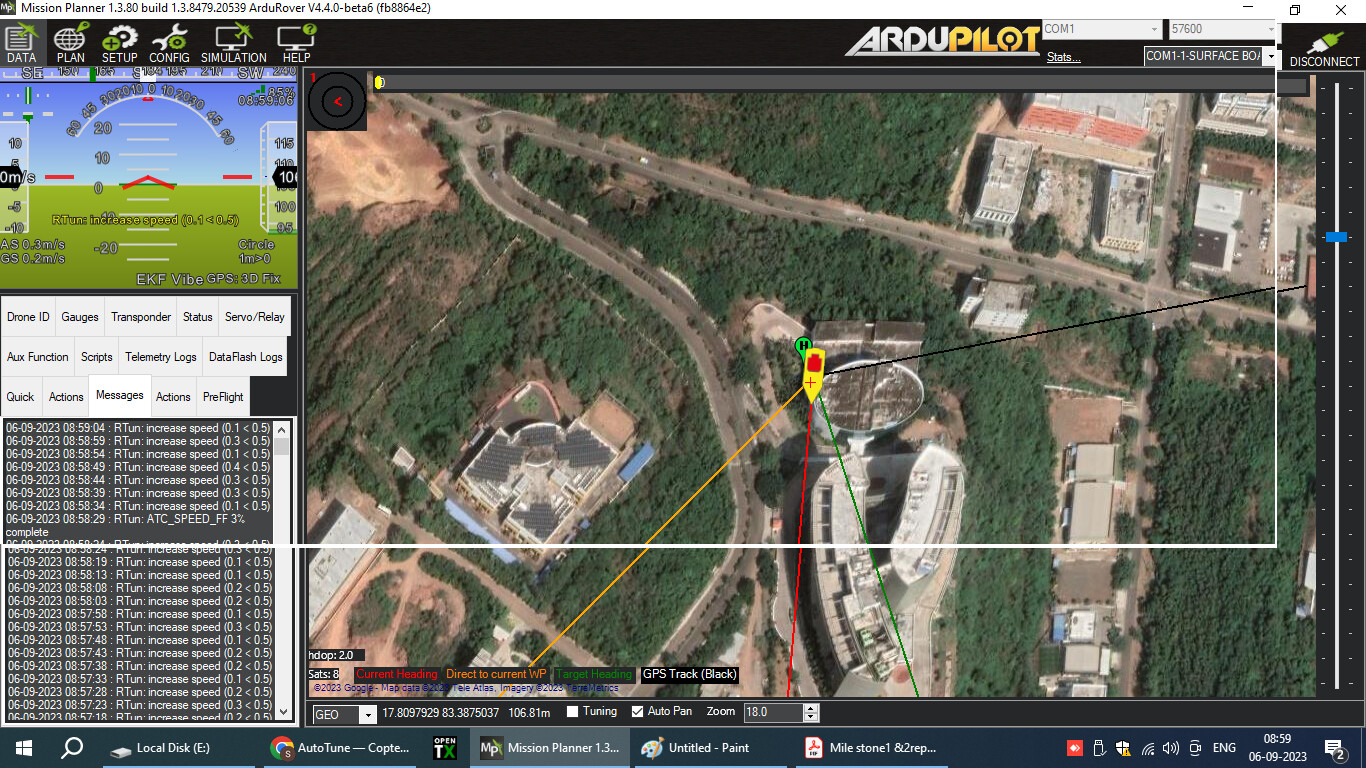
based on this process i checked but in the process it is showing increase speed 02<0.5 like that it is showing in the message bar and screen also what it is showing ,shall i change anything on that time
screen like this getting