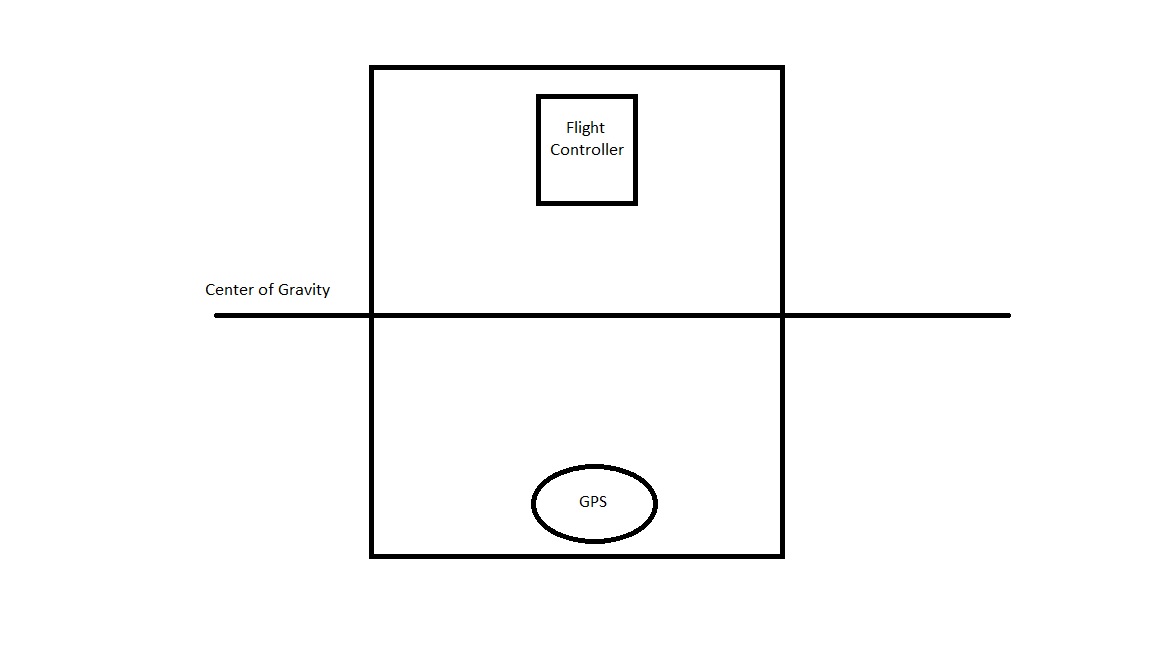
I have a question regarding two sensors (1 being the flight controller and 1 being the GPS) and I hope not a dumb one. I have a drone that it is impossible to mount the flight controller in the middle of the frame and is going to be off by about 20 inches forward from the center of gravity. The GPS is mounted all the way in the back of the airframe about 32 inches from the center of gravity. I realize that if it is less than 6 inches you will see no performance difference, but we do spot spraying with RTK and want to get it all dialed in the best I can. You can see the (cheesy and not proportional) diagram I made of the frame, flight controller, GPS and center of gravity. This is just going to be on the X axis for both sensors.
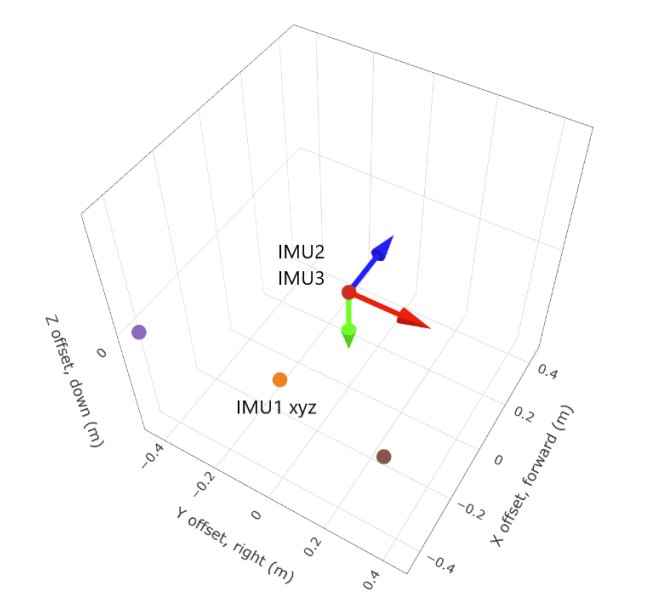
I would change the offset compensation parameters for the flight controller (below) all in the X axis to .508 (20inches to meters)
INS_POS1_X, INS_POS1_Y, INS_POS1_Z
INS_POS2_X, INS_POS2_Y, INS_POS2_Z
INS_POS3_X, INS_POS3_Y, INS_POS3_Z
Now for the GPS offset compensation numbers. With the GPS being 52 inches away from the flight controller and 32 inches away from the center of gravity, would I make it from the actual physical location of the flight controller (-52 inches or -1.3208 meters) or the center of gravity (-30 inches or -.762 meters) when changing:
GPS_POS2_X, GPS_POS2_Y, GPS_POS2_Z
I hope I am making sense. I am thinking it is the center of gravity -.762 meters, but let me know if I am wrong.
Thank you.