Hi Everyone,
I’ve a Pixhawk (v1) and am thinking of making a AT.
I was able to get it work following instruction (specifically that FC/Pixhawk must be mounted in the moving platform on both pan and tilt axises).
I came across this video clip on YouTube - https://www.youtube.com/watch?v=mt1OiskJ7bc.
Per the video, I like the compact design and specifically stationary FC and other part, and just moving the antenna part.
I did not managed to get my AT working this way.
Question is - Has anyone done this with latest Ardupilot AT firmware using Pixhawk?
If so, please share with me the video, and would be grateful if you can share the trick how to get this configured to keep FC, compass stable (not moving platform)?
The confusion here is that the author calls it an APM AT but it is really the old generation Maestro Pololu USB servo controller. This approach requires that the GCS is running on a PC that has access to GPS information. You can find it documented in the APM Wiki below.
Hi Greg,
Thank you so much for the clarification and the link.
.
Following your great explanation I managed to get the AT working in simulation.
.
I still would like to know if at all possible to use Ardupilot and configure AT Pixhawk with GPS+Compass mounted station
except Antenna moving) without GCS.
.
So far I have not gotten close to working.
.
You need the ACC on the flight controller to give you up/down orientation. The compass is needed to give you rotational direction. Although you can mount an external compass, it is usually easier to just use the internal compass since the flight controller is already mounted on the pan/tilt axis.
Perhaps a smaller flight controller (with on-board compass) can be considered, like the Radiolink Mini Pix. For further details, check out my build thread below.
I just got a rotational base. But I’m waiting for continuous servo.
With just 180 degrees 20kg torgue servo, if the tracker has a bit of difficulty (or latency) if the airplane passes right on top of the tracker.
Without 360 degrees continuous servo, together with rotational base, I really hope the tracking behavior will be much more instant and in align with the airplane’s position.
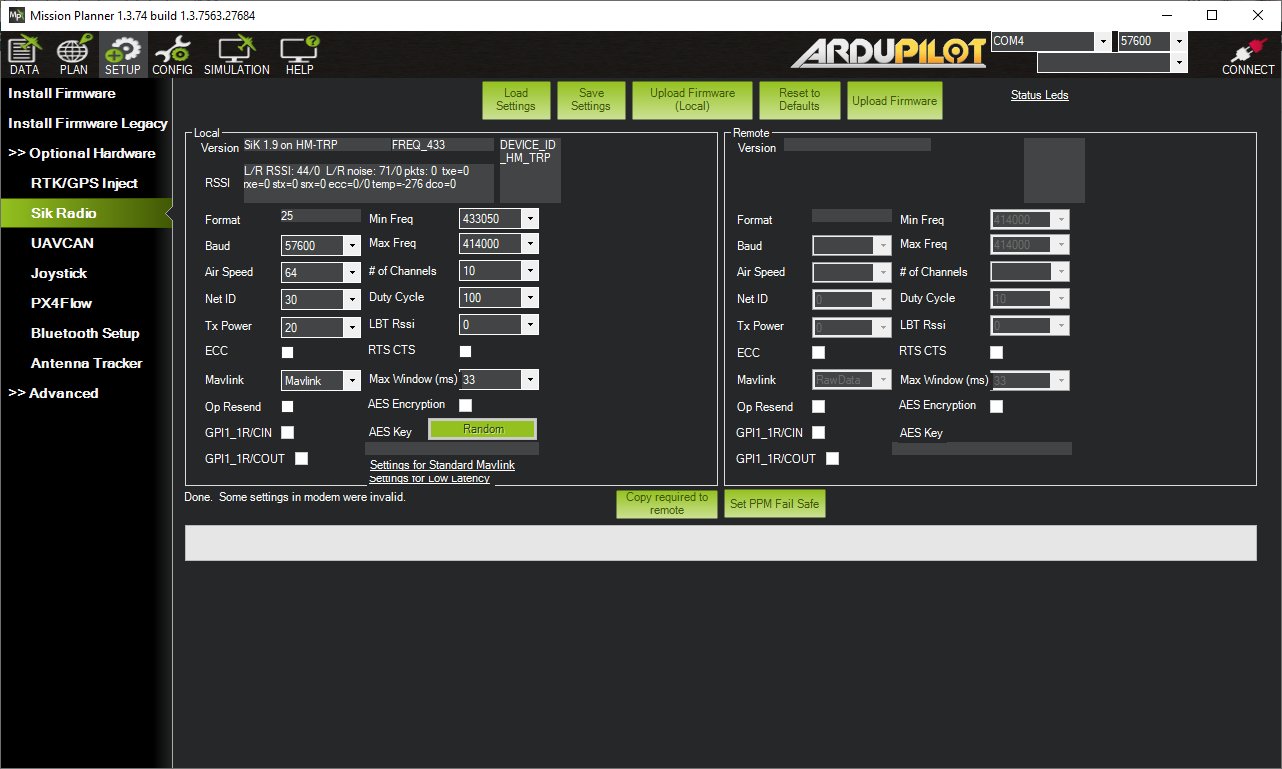
When the plane is farther away, the tracker should follow it just fine. One thing you can do is to adjust the telemetry communications setup screen for faster transactions. Here is what I use on my antenna trackers. No Op Resend, No Encryption, No AES Key, Max Window of 33ms.
I use 915Mhz telemetry from AAT to Vehicle and 433MHz from AAT to GCS. No sharing of channels.
Thank you Greg.
I will try that setting. I’m waiting for second pairt of 3DR radio (the one to be used between airplane and AAT.
I will update you once get this setup and working.