Hello! I am building my first Rover and have question about motor controllers. I am familiar with building multiple drones In past with different versions of pixhawk.
Can I use controller below In my build with pixhawk 2.4.8?
Two preset speeds wont work and the pwm mentioned is 0-100% duty cycle pwm which is Not to be confused with rc pwm which the autopilot can output.
So no.
Look for an rc esc be it brushed or brushless. You need full variable speed control via RC protocols to allow the loop controls to work in ardupilot that allow nav and heading control
Hello! I actually have now flipsky Mini FSESC4.20 50A base on VESC® controllers that I try to get working. How shoudl these vesc’s work with brushed motor since there is no option to choose dc motor in configurator?
you dont need the configurator for a DC motor as there is nothing to detect, just set it to DC motor in the motor options (instead of BLDC or FOC) then set the current limits. I think you use the 2 outer motor wires when using DC mode.
Oh now I found it. Still wont be able to get motors spinning via ardupilot. From vesc controller there is tab where I can test motor rotation direction and it turns. So probably it is from vesc rc settings? How it reads rc connection
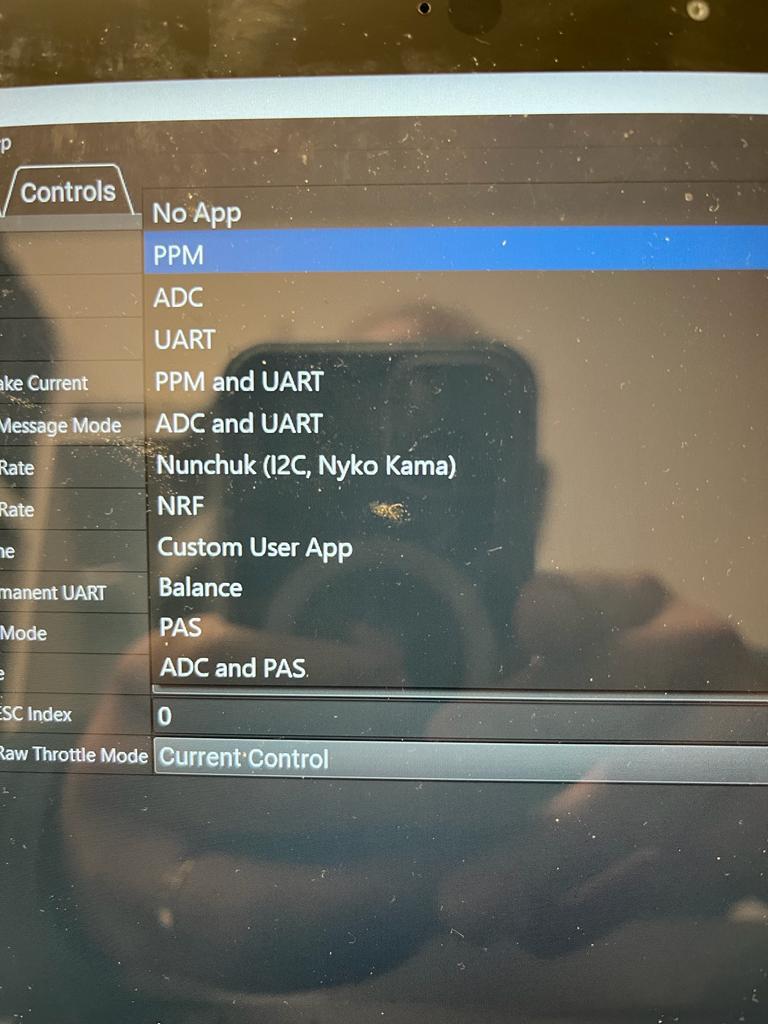
Okey I managed to get motors running but now it works so that if I keep throttle at 20% from controller the speed increases until close TL maximum. There is no rc pwm so PPM was the only option I got them working. Also motors spin little different speed. Any recommendations how to fix these issues? Probably related to Esc rather than ardupilot but havent gotten any response from vesc comminity.
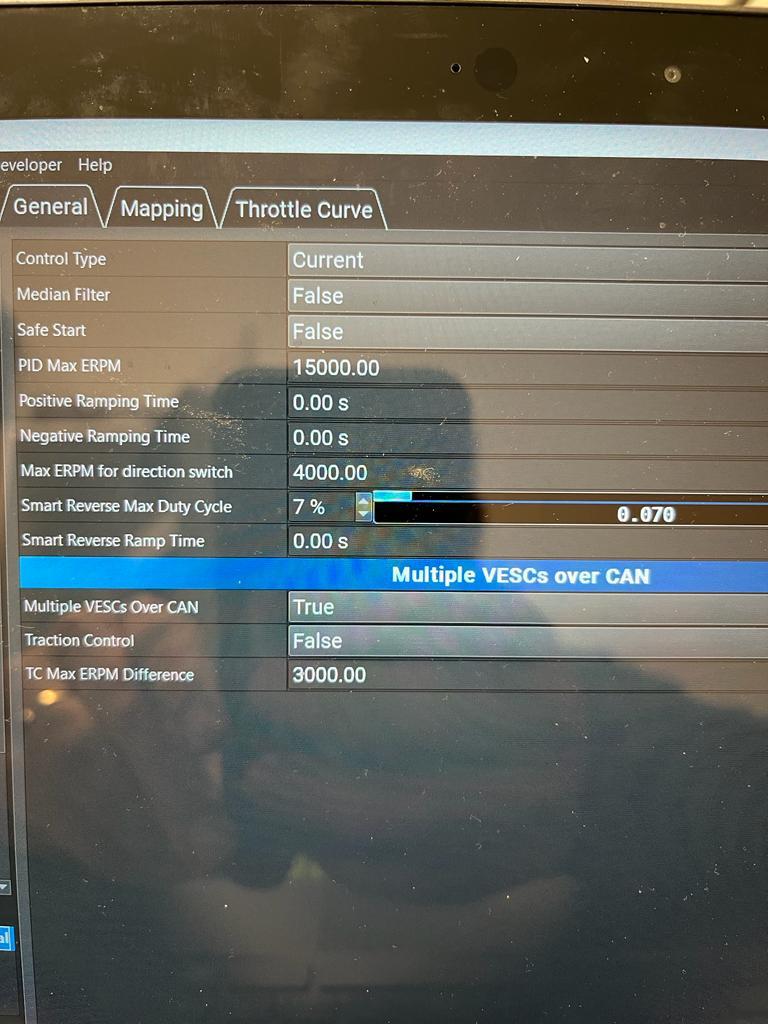
You have the control mode set to “Current”. For a lightweight rover (and compatibility with ardurover) better use “Duty Cycle”. The motor rpm keeps increasing, because the stick input controls the target current value. With no load, the current never reaches this target. Current control is used for electric skateboards and e-bikes.