We want to build a drone follow me with tower . We choose to use the beagglebone blue card. We have alot of questions
How can we do for calibrate all the captor ( gyroscope , gps module , bluetooth module ) ?
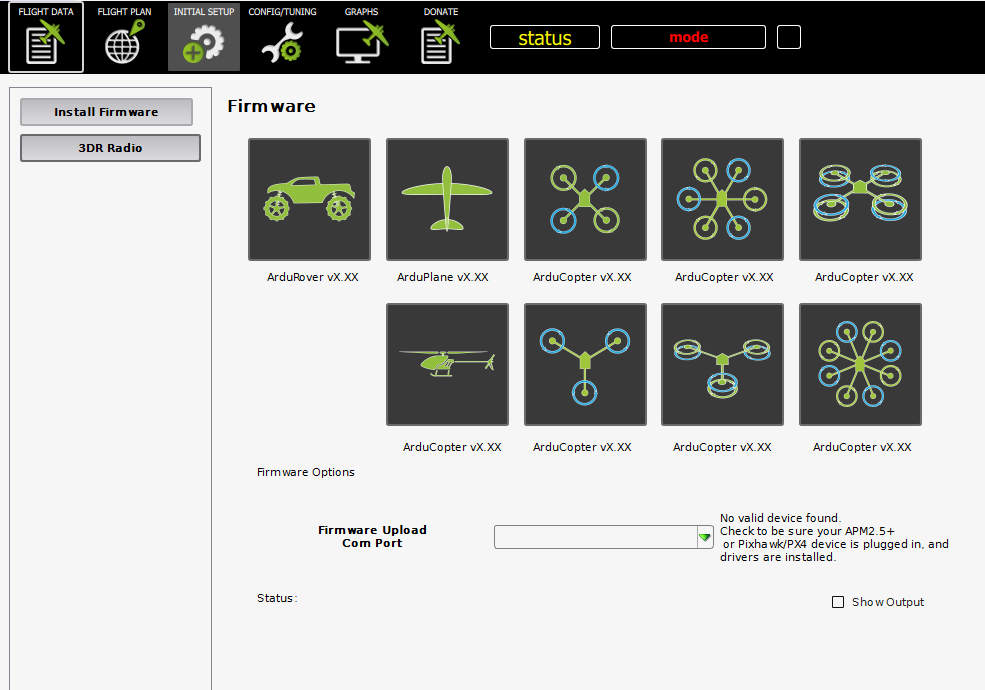
Error : 3UPrearm: RC Roll not confiugred3VPreArm: Compass not calibratedpj3WPreArm: Compass not calibrated-3XPreArm: 3D Accel calibration needed3YPreArm: check firmware or FRAME_CLASS3ZPreArm: Throttle below Failsafe [QbO$PUBX,41,1,0023,0001,115200;0*1C
Is there any config file for arducopter so that we could configure the PID ?