Hello all. I have a pixhawk 2.1 cube on a quadro frame. The motors are iPower MT4114 400KV. Propellers t-motor 15x5. The battery has 22,2V 17000mAh. During the test of the hint in the loiter mode after 10 minutes the drone suddenly fell from the sky from a height of 5 meters. There was a slight wind and the drone was quite nervous at this wind. I am asking you to analyze logs and parameters. I completely can not read the logs and I do not know where to look for the cause of the fall. I also attach logs and parameters. I would add that I have a general problem with the resistance of drones to the wind. After the autotune, the drone is great, but when problems begin to blow up. I put up constructions, which in principle are supposed to stay as long as possible in the air, but something does not work out. I am asking for help in this matter.parameters.param (14.4 KB) https://drive.google.com/file/d/12LjoWihWdLf4qfd0VjZ2LsklabA-vI85/view?usp=sharing
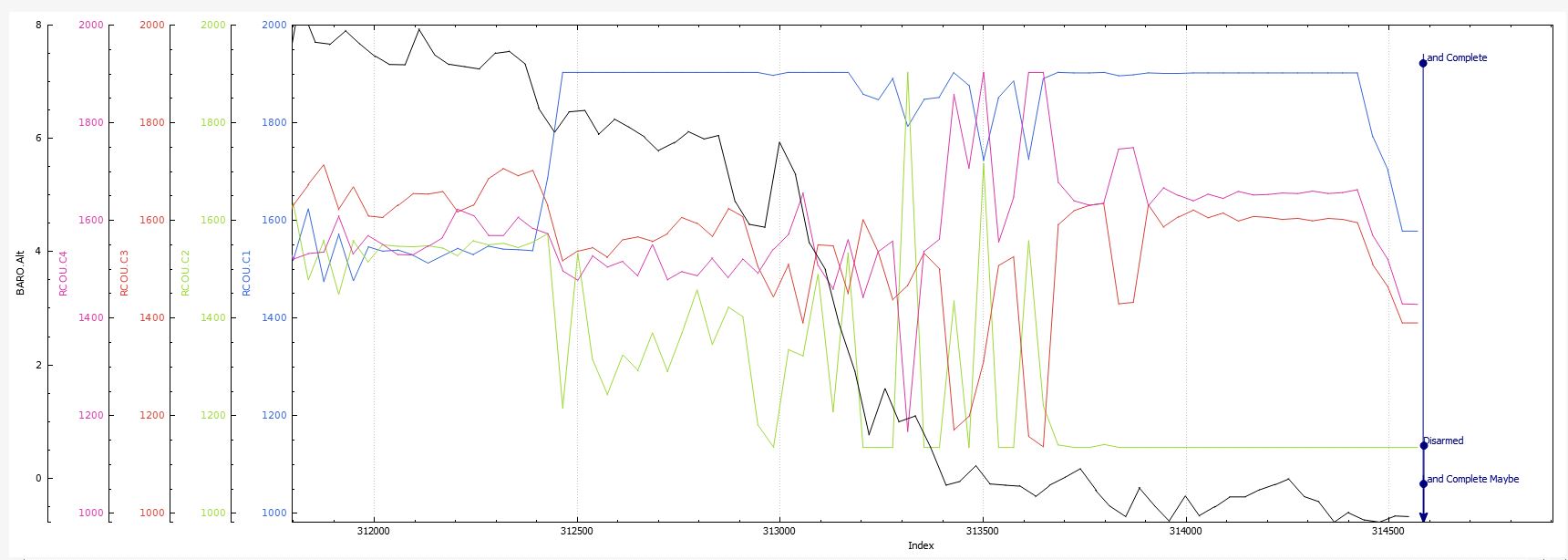
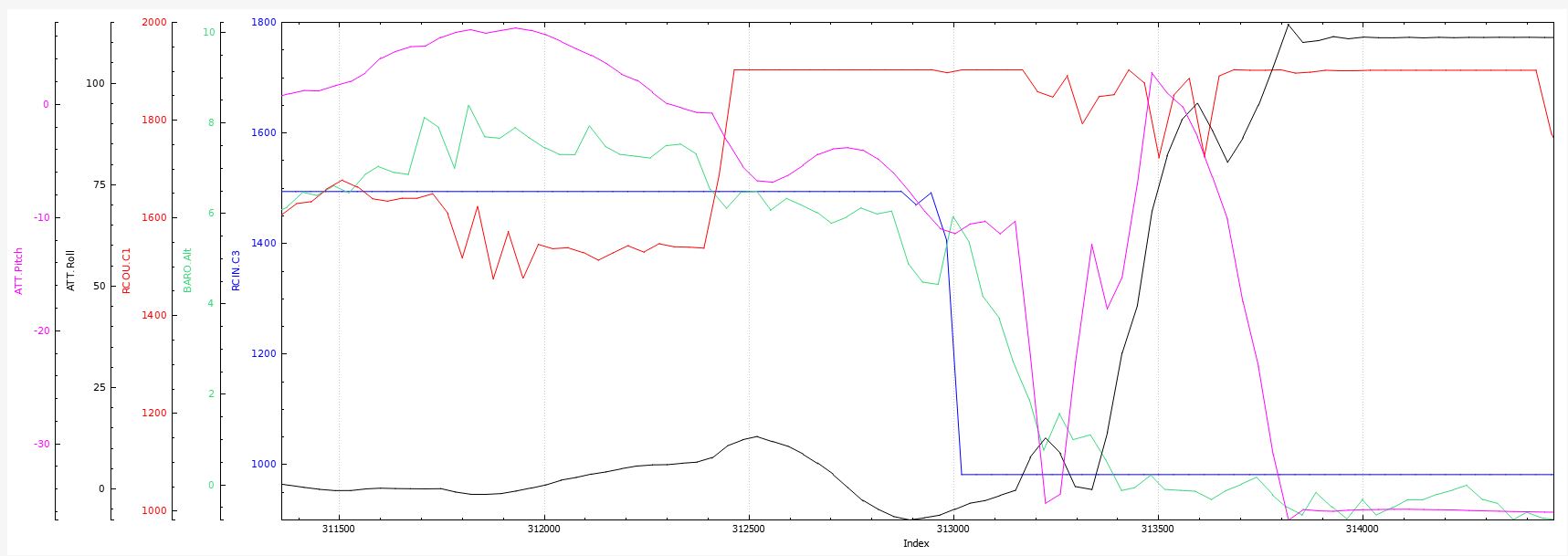
Mechanical failure of a drive component (motor, esc, prop) of Motor 1 possibly. Motor 1 was commanded to maximum indicated a loss of thrust and Motor 2 (opposite arm) was dropped to compensate.
As Dave said, problem is in motor1/ESC
Tune looks like Ok.
Maybe it is nervous in wind because of baro readings (I am not an expert but I see it a bit noisy). I don’t know if it is properly protected.
In fact, the barometer is not sheltered. Pixhawk cube is embedded on the upper deck on vibration-absorbing foams. I’m not an expert either and I do not even know where the barometer is in the controller. Do I have to cover the entire controller with a sponge or foam?
I am after next tests and on 17x5 propellers, the drone behaves nervously during gusts of wind. I set up a 14x4.8 maytech propeller and now the drone behaves much better than before. It’s nice to breeze. Can one inch on propellers make such a difference?
Both barometers, in the FC and presumably in the GPS module, (Here GNSS?) are protected from the factory. I think they look OK. Another interesting thing I see in the log is the timing of the events. It looks to me like you had a loss of thrust on motor 1 which caused some pitch and roll and then you dropped the throttle. From there it quickly lost altitude and stability and crashed.
Maybe a desync issue at low RPM with the larger props, what ESC’s are you using?
You’re right, I’m using a gps antenna here. And in fact, when I saw that the drone lost its thrust on one of the motors, I moved the throttle down to land as quickly as possible, but with the lack of stability I crashed. I was surprised by the drone’s behavior and I panicked. I use esc T-motor FV 45A 3-6S 32 bit. This begs the question: how can you eliminate esc desynchronization?
For me it also seems that there is an issue with the motor 1 or ESC 1. I don’t think that those ESCs are the correct one to use for low kv motors. They are used for high kv racing drone motors. On the other side the other ESCs are working. So it could be a faulty ESC or a faulty motor.
It can also be an issue with the motor. I had a similar problem and the reason was the Motor. Switch once the motor around and then you see whether it is the ESC or the motor.
But in principle I would recommend hobbywing xrotor 40A or 40A pro for that setup.
Harald
Post a shot of the ESC setup in BLHelisuite maybe there is something to see. There is generally no problem using BLHeli_32 ESC’s with any motor even low kV. One problem often seen is “Low RPM Power Protect” is enabled by default and this won’t work with low kV motors. But the result of that is usually the motors won’t throttle up. That said you can’t go wrong with X-rotor ESC’s.
Thank you for the hint. I have a new motor in stock so I will replace it and see it. If this does not help, I will enable the Dshot function because at this moment ESC are set to normal mode. And if that also does not help, I will replace the regulators. I’ll let you know about my progress.
ESC weren’t set on BLHeli. There were set on “normal” mode in Mission Planer. Doeas it mean that Mission Planer also have some “Low RPM Power Protection” settings like BLHeli? If it does, how to disable it?
You don’t “set them on BLHeli”. They either run BLHeli firmware or they don’t. You said they were 32bit so I assumed they were running BLHeli firmware. Low RPM Power Protect is a setting in the BLHeli firmware that can only be changed in BLHeli Suite.