I’ve been working on an FX-79 quadplane build and am have started hover testing. However, when it takes off it seems fine for about 1-2 seconds the starts yawing left and I can’t get control of it. Here is a video: https://www.youtube.com/watch?v=5EbzGHl4CL0&feature=youtu.be I have tuned the quad PIDs to get rid of vibrations seen in the video, but it still does that yaw left. The CoG is slightly forward of the center of the quad motors, but not by much. I also noticed the compass offsets were fairly high, so I tried moving the GPS out near the nose and a bit higher, far away from any power distribution but still saw the same effect. Any thoughts would be very helpful!
The dataflash log contains a couple takeoffs in qloiter and qhover. 2017-08-14 18-53-39.bin (439.1 KB)
If I saw it right in your video, the motor arms are running front to back under the wings, so X should be the right choice.
It makes a difference. Quadplanes flex even more than a multicopter and that flex creates thrust vectors that might cancel out the torque needed to yaw the airframe. So you want a setup where the thrust vectors add up with the torque.
How did you have your pixhawk orientation ? I am trying to do the H frame,yaw issue solved, but heading is 90 degree to orientation of pixhawk in quad mode, but normal in plane mode. what to do?
My pixhawk was just facing straight ahead, didn’t have any problems after the H-frame fix.
You may have already checked out your AHRS_ORIENTATION and COMPASS_ORIENTATION params, but worth looking at those again. I have also seen some magnetometers that are just hard to calibrate, whether it be their environment onboard the plane (check for DC power cables or magnets) and occasionally flying using COMPASS_LEARN helps.
in H Quad the heading is like or but my plane heading is ^. if i am keeping the quad motors in other numbering or directions i am having yaw/wobble issues.
it might. the purpose of h-config is to match the frame twist with the rotor moments (note that frame twist creates a large moment due to thrust vector tilting).
before flying, triple-check to ensure you have the config (x or h) and motor rotations correct! a mismatch here results in catastrophe.
cant tell how stiff that aircraft is, but i think its safe to say that if the structural members holding the motors do not emanate from the center, then it should be h-quad config.
edit: actually scratch that. if you have a “rotated” h-quad, then the moments will favor x-quad config i think.
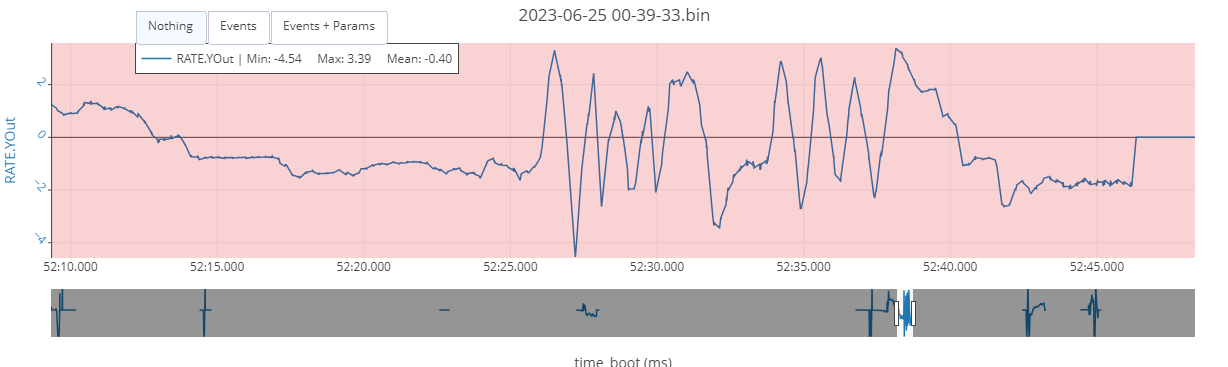
actually it’s currently x frame type and as you can see it goes to the left and no YAW control from remote also i check the RATE.YOUT value looks high .
for yours, it seems like h-quad would be better. be very careful testing this out. changing quad type has risk of spinning wildly out of control, since the moments are opposite (prolly safe in your case, but still). my prior “scratch that” was just referring to my generalization attempt.
this is easy if you understand the moment on the propeller (which is opposite of spin) and the moment created by tilt. they should be made the same direction.