Home
Blog
Stores
Docs
Copter
Plane
Rover
Sub
ArduPilot Discourse
Quadplane with 2 Front Tiltrotors - Servo Power Issues
ArduPlane
VTOL Plane
Rolf
(Rolf)
December 12, 2018, 7:52pm
9
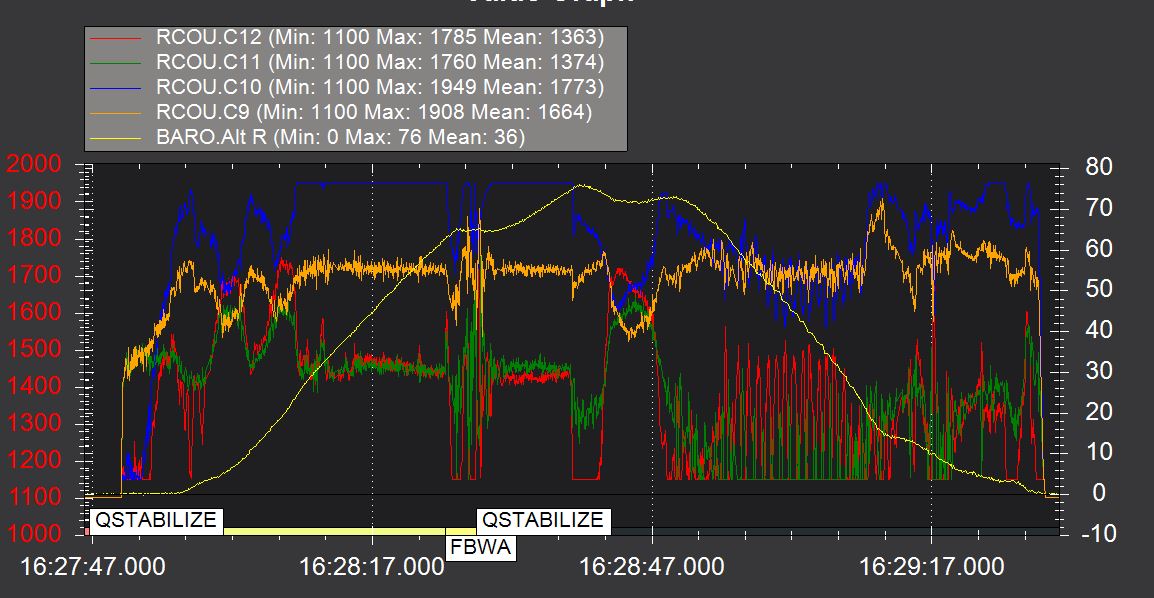
It may not be the cause of the rotaion, but motor 2 is saturated during climbing !
Unbenannt.JPG
1154×598 110 KB
Rolf
Tiltrotor support for plane
show post in topic