I am trying to fly one quadplane, it will be the first flight and the system is little big so need your guidance and help. One of my friend introduced me this wonderful forum and he told me that he learned so much from this forum, I am also looking for the same learning.
I have recently done the small test flight and my quadplane lifted off in Qhover and Qloiter mode at 50% throttle, I am using the center stick controller so as soon as I am releasing the stick after arming, it is taking off around (0.5-1m). It was not supposed to lift off at 50% throttle as per the wiki page about these modes right?
I have done the initial setup and calibration, the only thing pending is battery monitor I have ordered the maunch fsensor and soon install it.
What I noticed is that motor 2 & 3 are spinning very slow while arming, I am curious to know why as I have done the ESC calibration and have set the spin and arm values correctly.
Looking forward to your views, suggestion, help and support.
Normal for those flight modes. They both use the Altitude Hold controller.
Correctly would be a Q_M_SPIN_ARM value where all motors spin smoothly when using Motor Test to determine it. How do they spin when armed in Qstabilize?
Thanks for the reply Dave!
So there is no issue in lifting the drone as soon as I release the throttle stick right?
Yes! I have set the Q_M_SPIN_ARM and Q_M_SPIN_MIN after the motor test. I have not tried it in Qstabilize mode as the quadplane is very big and I don’t have much experience in flying in stabilize mode.
I will fly it again in Qhover and try to get the data for the notch filter.
Ok, I understand your question. The mid throttle position has to be learned by hovering in an assisted mode like Qhover or Qloiter for a time. This usually takes <1 minute and you will be adjusting the throttle until its hovering at mid-stick.
Hey Dave!
Have you got any time to check the logs? Can you please just see the logs and tell me whether everything is fine or not, It would be great help for me and I really appreciate your support.
Once you confirm me the Notch filter setup then as per the docs, the next step is manual tuning and as my quadplane is big & engine based plus I don’t have any experience of the tuning much so will it be fine if I directly perform the Quick Tune LUA Applet? and just to tell you I have not installed engine yet as it can cause more vibrations in the drone and make the initial tuning difficult. After quick tune, I will install the engine and then again do the test flight in VTOL mode.
If anyone who is having experience in engine based big quadplane flying reading this then please let me know your views on the first quadplane flight setup. It will really help me. Thanks in Advance!
Yea, looks like the latest commit. Up to this point your questions have been mostly vehicle type agnostic (Multirotor/Vtol quadplane) and I have not tried the Quicktune Lua. So if you do have questions specific to that process you might want to start a new thread.
Hey Dave! thanks for the reply, Actually the thing is I started this thread for the problem which I mentioned above (still the same issue) and I also want somebody’s help who can guide me in the first flight setup of quadplane as my plane is very big so I don’t want to take any risk and I want someone’s confirmation or a review of the process which I am following.
I really appreciate if you could help me in this, I understand you might be busy and having so many other things to do and I totally respect your priorities but if you can take some time for reviewing and guiding me through the process it would be so much big help for me that I can’t express.
I have already gone through the wiki pages, doc is really amazing and clear. If some threads are available in your knowledge which will help me then please share it I will definitely read them.
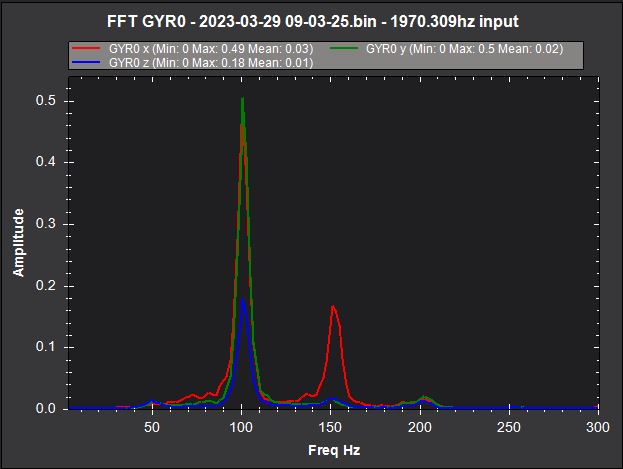
With the added mass the 50Hz mode is gone but the 150Hz mode is a harmonic of the 50Hz so keep the Notch setting for now except The reference:
INS_HNTCH_REF,0.270
Pre-filter
INS_HNTCH_REF,0.270 (Yeah! I have not noticed the latest updated hover thrust value) I will update it.
My prop size is 30"
Will it be safe to perform quicktune now? I have gone through the quicktune wiki page and got the clear understanding of how it works. I would be needing your help and advice for the fixed wing transition setup and tuning.
Hey Dave! There is one more thing I would like to ask you. My engine does not have electric starter so for the fixed wing flight I have to start the engine on ground and then take off in VTOL mode but Engine produces a good amount of thrust at Idle throttle. There might be chance that after tuning, the drone will behaving aggressive once I start the engine and take off in VTOL mode. What do you think? will it be a problem and is there anything which you can suggest?
Hey Dave! Thanks for the reply, Yeah! I also think that it can create a issue but I don’t have any option except flying and testing.
I have done the Quick Tune, It was done within 2-3 minutes and the result also looks good. The pitch & roll axis came out good but I can see some oscillations in yaw axis.
Hey Dave! did you get any time to check the logs?
I am waiting for your views on the log.
And do you have any tips and advice which I should keep in mind for transition flight?
Thanks for your responses, they have been very helpful.
A log of the tuning session isn’t that valuable although it does show it completed. Make another flight with some pitch, roll and Yaw action and post that. Qloiter is fine for this. Re-enable batch logging so the Notch filter can be reviewed again.
I’ll be travelling until Tuesday so likely won’t be able to respond.
Hey Dave! Thanks for the reply.
In the same log, I have given the roll, pitch and yaw input after the quicktune was completed. I will share one more flight log with enabling the batch logging and some more pilot input for understanding the tune.
I will be waiting, so once you come back please respond until then I will try more testing on my own and go through the doc again.
Hey Dave!
I hope you are doing good and came back from your trip. I have not done much testing in the last couple of days, was not feeling well. But Today, I installed and started the engine and did the ground test to generate the log and I have observed few things:
As soon as I am starting the engine, the pre arm error is showing up: “Gyro Inconsistent” (I guess because of the vibration, z-axis vibration are going over 30). To generate the log, I did the force arming and removed the VTOL motors props for safety.
I also turned on the batch logging for this test and found the interesting thing, I have seen the harmonics of Engine (around 60Hz). Can we put the second notch filter to overcome this harmonics? and if so then this above frequency will not be good as this is the engine idle frequency and when we switch to fixed wing mode then this would change as we increase the throttle right?
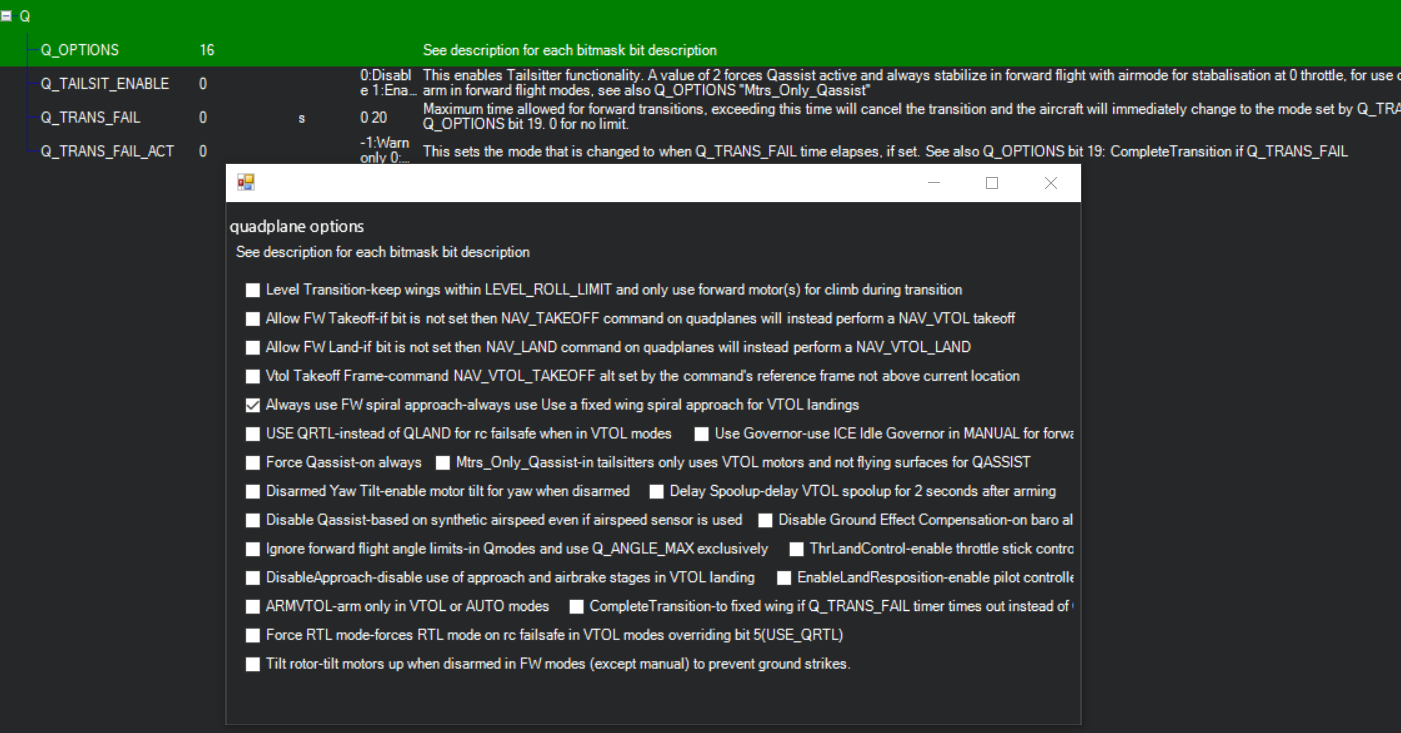
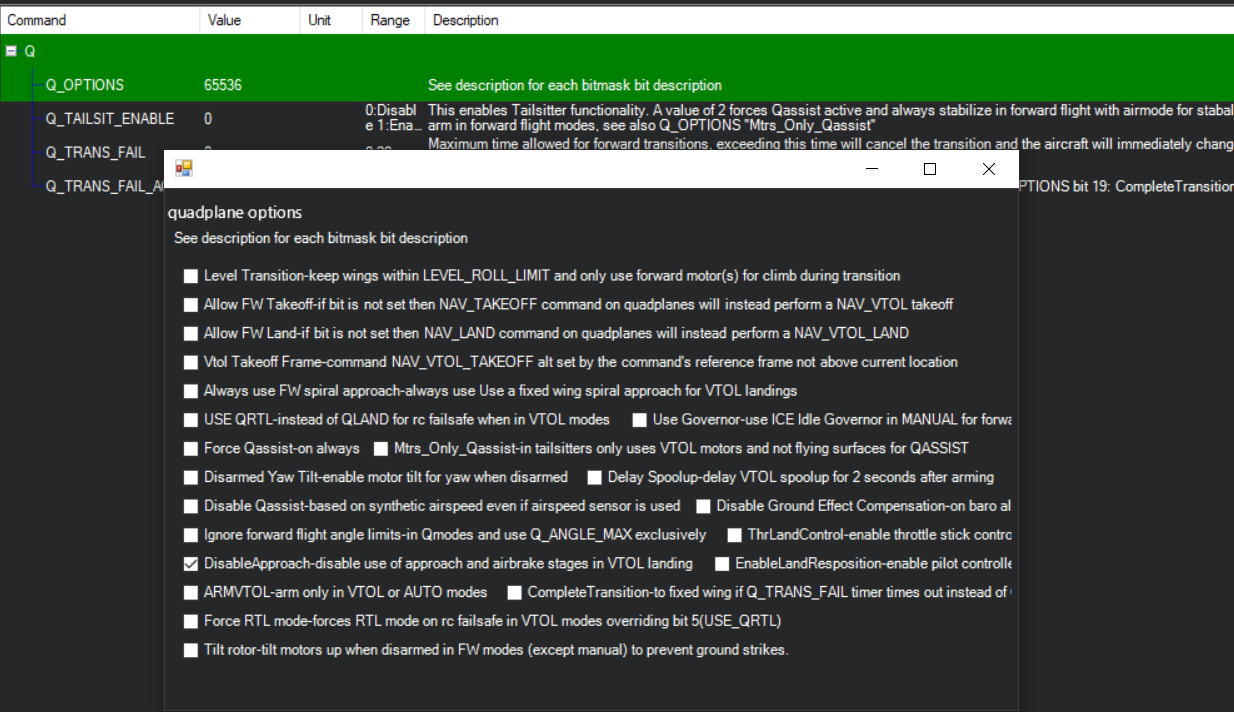
As per the doc, to set the QRTL as a pure VTOL RTL (multirotor), I need to set the Q_OPTIONS,16 but in the para descriptions it says FW spiral approach for VTOL landing. I want to call back the drone in multirotor mode if something happens so what para I need to set?
I can’t reduce the vibrations from the engine side as it is running at the idle position and hard & tight possible mounted to the fuselage. Will it safe to fly in this vibration? I have not performed the take-off and landing test yet as I was afraid to do after seeing the pre arm error of gyro inconsistent.
What do you suggest? do you know anyone who has experience in flying the engine based drone?, he might have already faced this situation so he can guide me a little.
Thank you so much for the support, will be waiting for your reply.