That’s not bit 16. It’s a bitmask. Google “bitmask” if you are unfamiliar with the term. Understand it because it’s used all over for various parameter options. I included a link to the parameter description.
1 Like
Hey Dave! Thanks for your reply
Yes I understand the bitmask as I earlier seen and used it for batch sampling and other purposes.
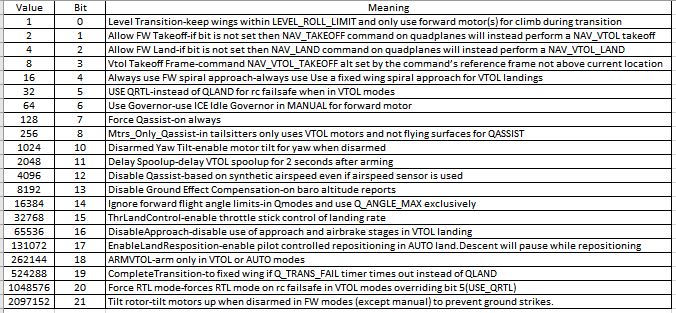
What would be the bitmask value for the pure VTOL based RTL? If I simply put the bitmask value 16 instead of selecting any option then it will automatically select the “Always use FW spiral approach for VTOL landing”
or shall I select the “Disable Approach-disable use if approach and airbrake stages in VTOL landing” under Q_OPTIONS? Once I select only this then it shows the bitmask value of 65536.
Looking forward to your reply.
We are going around in circles. Here:
1 Like
Hey Dave!
Thanks again for the clarification.
I am trying to set a radio failsafe for my Quadplane but it is not showing any option to select for a radio failsafe.
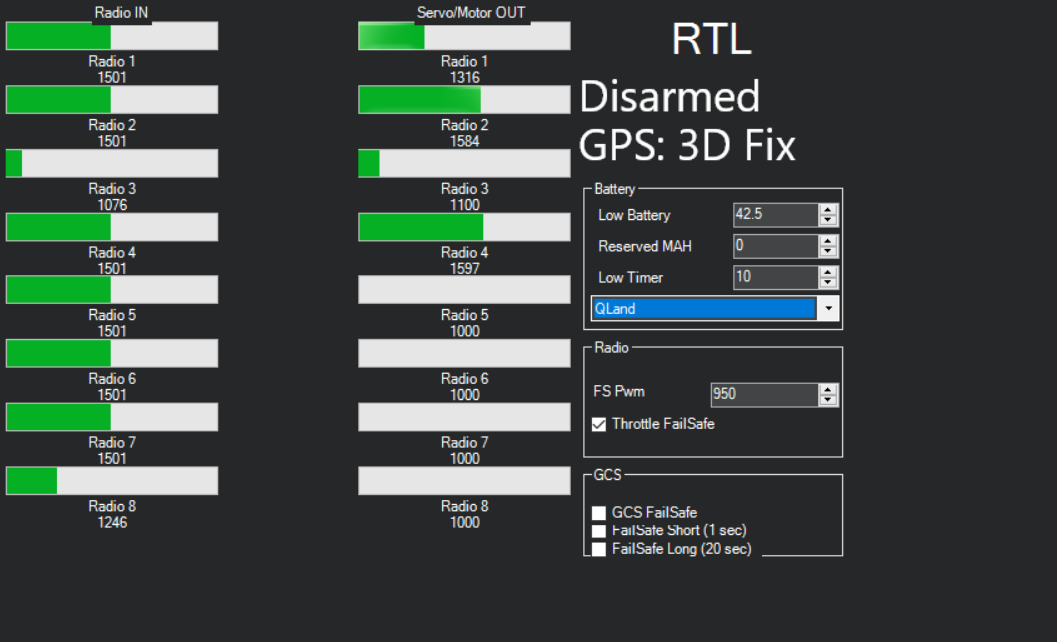
I want to set for a full VTOL mode QRTL in case of radio Failsafe. How can I set up this?
Looking forward to your reply.
Always check the Wiki 1st and then if something is unclear post a question about it:
Go here Flying a Quadplane
Radio and Throttle Failsafe (the same essentially) has the answer. Get used to using the Full Parameters list rather than those menus.
1 Like
Hey Dave! Thanks for the reply. I have already gone through the wiki few times but I could not find about setting the pure VTOL QRTL in case of radio failsafe.
As I have not tested my drone in fixed wing mode so setting the RTL mixed of fixed wing approach would be little risky. So sorry for troubling you with these questions, but I just wanted to confirm it from you whether it is possible or not.
I have one more thing to ask you. As my Quadplane is engine based and it does not have starter so I need to start the engine on ground and then takeoff and fly. So I have to trim the minimum throttle in a way that engine should not stop at the minimum trim throttle otherwise I can’t fly in a fixed wing mode.
But I want to assign some RC switch in way that it should rotate the throttle servo less than the minimum trim value. So that during fixed wing to VTOL transition, I can put the switch and throttle servo will come back to the minimum (less than the trimmed value) and engine will turn off completely. Is there any way to set this kind of setup?
There are 2 ways to stop the engine:
First is moving the servo at the extreme minimum value (1100), I trimmed the throttle to 1150 so that engine will keep on running at the minimum speed.
Second is to turn off the power, I am powering the engine throttle from the BEC. Is there any way to make some kind of relay switch to turn on/off power to the engine throttle through Pixhawk? So that I can turn off the engine power while landing for the safe landing.
Really looking forward to your reply. Again sorry for all the trouble and a big thanks to you!
Create a switch mix on your transmitter to drop the throttle value to what’s required to stall the engine. What RC system are you using?
Or you could use a relay or PWM switch to cut power. The 1st approach seems simpler.
1 Like
Hey Dave!
Thanks again for the reply, Actually I am using the skydroid T12 transmitter and I have also thought to do the switch mix but I have tried with this transmitter and it seems that it does not have any option for switch mixing.
How I can make a relay to cut power? my servo is powered by external UBEC, I have connected the servo signal & ground wire to the Main 3 port of Pixhawk. So how can I make the relay here which can be controlled by RC switch to cutoff the power?
Really looking forward to your reply.
Hey Dave!
One more thing I want to ask you, I have done the full setup for the fixed wing flight and I am going to perform the test flight tomorrow.
Here is what I have planned:
- I will take off in the Qloiter mode as Qhover will drift because of the engine being turned on.
- Once the drone reaches some 40-50m altitude I will switch to the FBWA mode and try to maintain the flight altitude by increasing the throttle and other stick input manually. If something goes wrong, I will switch to the Qhover mode and then switch to either Qland or QRTL (pure VTOL).
- If the transition goes well and after doing few turns then I am planning to switch to loiter mode and see how the drone behave.
- If everything goes good then in the next flight I will do the autotune for fixed wing mode and perform some Auto mission.
I need your help to check whether everything is properly setup or not for the transition flight. Please give your valuable suggestion so that I can consider that for the tomorrow’s test flight.
Here is the full latest parameter list: https://drive.google.com/file/d/1hlNuhzmSqfGnksGs7CzFXglBwMFmETIR/view?usp=sharing
And one more thing, I have not adjusted the Notch filter yet. Here is the test flight which I done with engine running for the notch filter data: https://drive.google.com/file/d/1WCK9azf8QjeMZtuCbuMZ-uyLxpG7vaEj/view?usp=sharing
I am guessing for the Notch freq of 34hz, the plot looks different as there is so many harmonics of the 34hz frequency. I want to know your views on that, I will adjust the notch filter after your suggestion.
Really looking forward to your reply and suggestion. Thanks for all the help, you have been a really great guide to me.
You still need a switch mix for the relay. I don’t know anything about that Transmitter (if it doesn’t run EdgeTx I don’t use it) but surely you can mix an available switch or button for auxiliary function?
1 Like
Try these. I would perform another hover test and a short Qloiter flight to see how it does. 34Hz is getting low for the notch filter
INS_HNTCH_ATT,40
INS_HNTCH_BW,17
INS_HNTCH_FM_RAT,0.9
INS_HNTCH_FREQ,34
INS_HNTCH_HMNCS,31 (which is harmonics 1-5)
1 Like
Hey Dave Thanks for the reply.
How can I do that? as my throttle servo is connected to the MAIN 3 port, Do I need to make the 2 connection of a same servo? one for the throttle channel and one more which can be connected to the AUX and can be assigned to some RC channel?
And one more thing, I need to ask you. How can I mix the aileron and rudder for the coordinate turn? Is this parameter correct for the rudder aileron mixing: KFF_RDDRMIX? It is set for 0.5 by default, but when I move the aileron on ground in FBWA mode, the rudder does not move accordingly. Why is that? as per the mix, the rudder should move when I give the aileron movement for the coordinate turn right? am I missing something here?
Thanks again! Looking forward to your response.
You would need to pick up the plane and roll it. Testing this stationary won’t tell you much.
1 Like
Hey Dave!
Thanks again. Finally I have done the transition testing and something unexpected happened, I got the radio failsafe within the few seconds of transition (they mentioned the RC range of up to 20km, but I got failsafe after 1km distance). I almost crashed the drone but nothing much damaged so I will fix it again and try another flight.
Btw, The transition seemed good and smooth, but did not completed fully.
Here is the log file of the flight: https://drive.google.com/file/d/168tl6C4HJFwvZykyMUJth9jurb_xA_Jz/view?usp=sharing
I want to know your views on the transition and the fixed wing flight, although the FBWA flight was short but if there is something which you can observe and tell me about the plane then It would really be a great help for me to plan the next flight.
I observed that there is big difference in the GPS speed and airspeed sensor speed measurement.
And I have something to ask you, as my RC is giving the radio failsafe so I can’t try the manual flight again until I have some good long range RC system. So is it possible if I take off in VTOL mode up to 50m and then switch to the fixed wing loiter mode? Do you have any idea of how does the plane behave and how does the transition happen in this case? I have put a good loiter radius (130m) so that plane will not have any issue in turning and moving in circle.
I am just afraid about the plane behavior and how the transition happen in this case.
Looking forward to your insight and views. Thanks again!
Hey Dave!
I am still waiting for your views and advice on the above post. I know I have been asking too much but I guess I am very near to make it fly successfully so need your little guidance and help for few more days.
Anyway thank you so much for everything. I hope we will meet one day ![]()
Hey Dave!
I hope you are doing good. I guess you are unavailable for few days. Please reply to my query as soon as you get back. I will be waiting for your reply.
Thanks!
Hey Everyone!
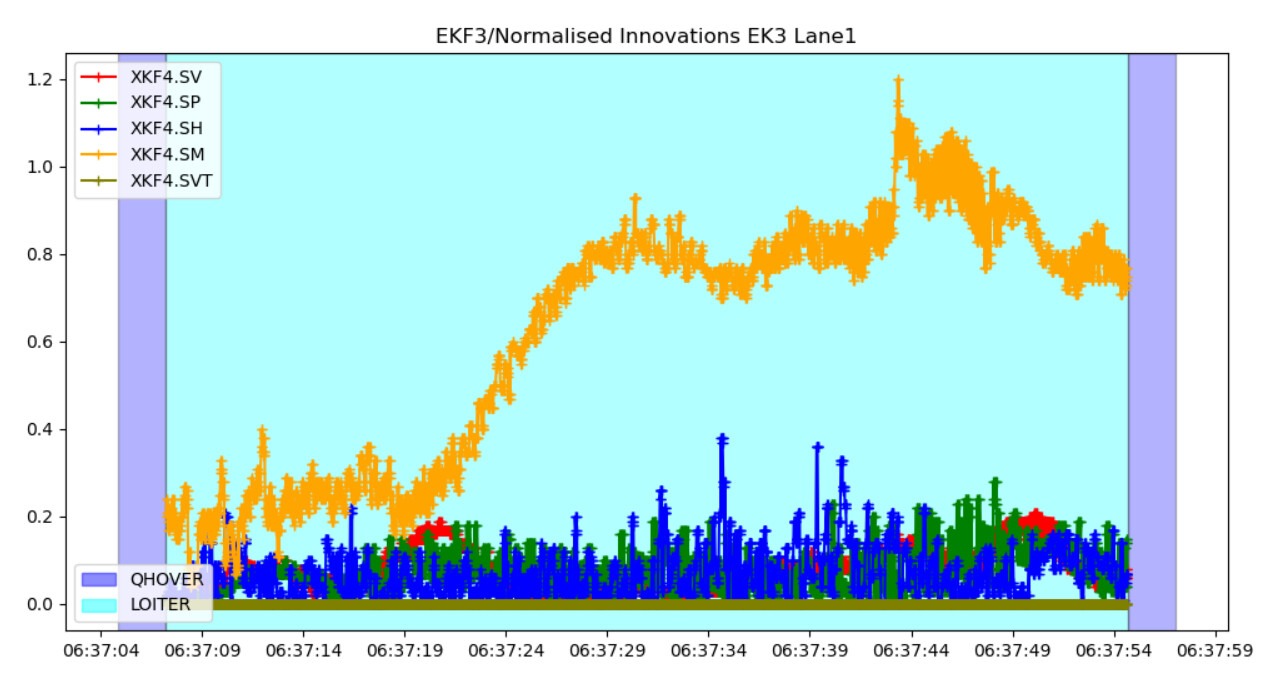
I have been trying to fly one big VTOL. Yesterday I had a test flight, I tested the loiter mode and transition was good & successful but the compass error was growing. EKF for compass went above 1 so I switched to VTOL mode to avoid any crash. I have few queries regarding the flight I would really appreciate if anybody answer them, I am new and still learning so some of the queries might be simple.
Here is the flight log: https://drive.google.com/file/d/1M55Vg79MeRdv0Zj3PbeTMvBXiza25Gdx/view?usp=sharing
-
Is it common for the EKF compass error growing during turns? I have read in some ardupilot discussion that drones can have a compass problem during turns. But I guess more than 1 EKF value would be little risky for the safe flight.
-
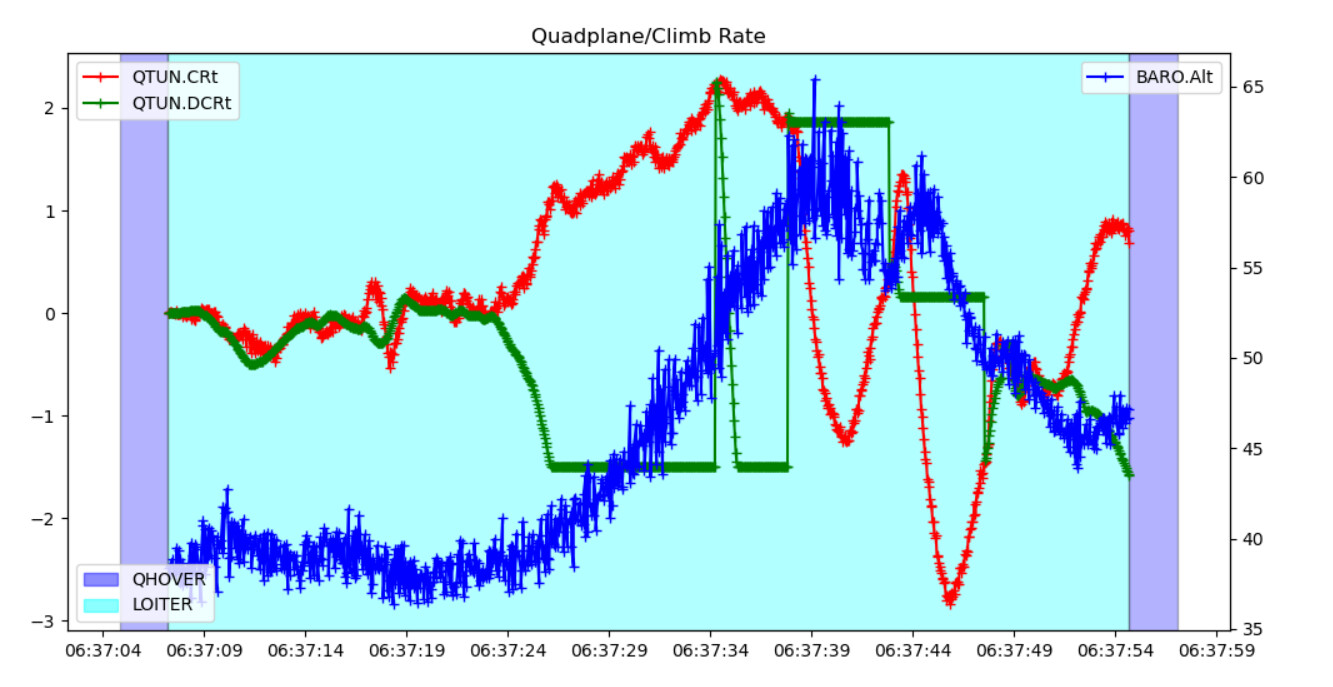
The Quadplane climbed during the transition from 35m to 60m. Is this normal during transition, as per wiki the drone will maintain the altitude in Loiter mode. And I am also curious of how it climbed because I am not seeing any elevator deflection (servo2 & servo4).
-
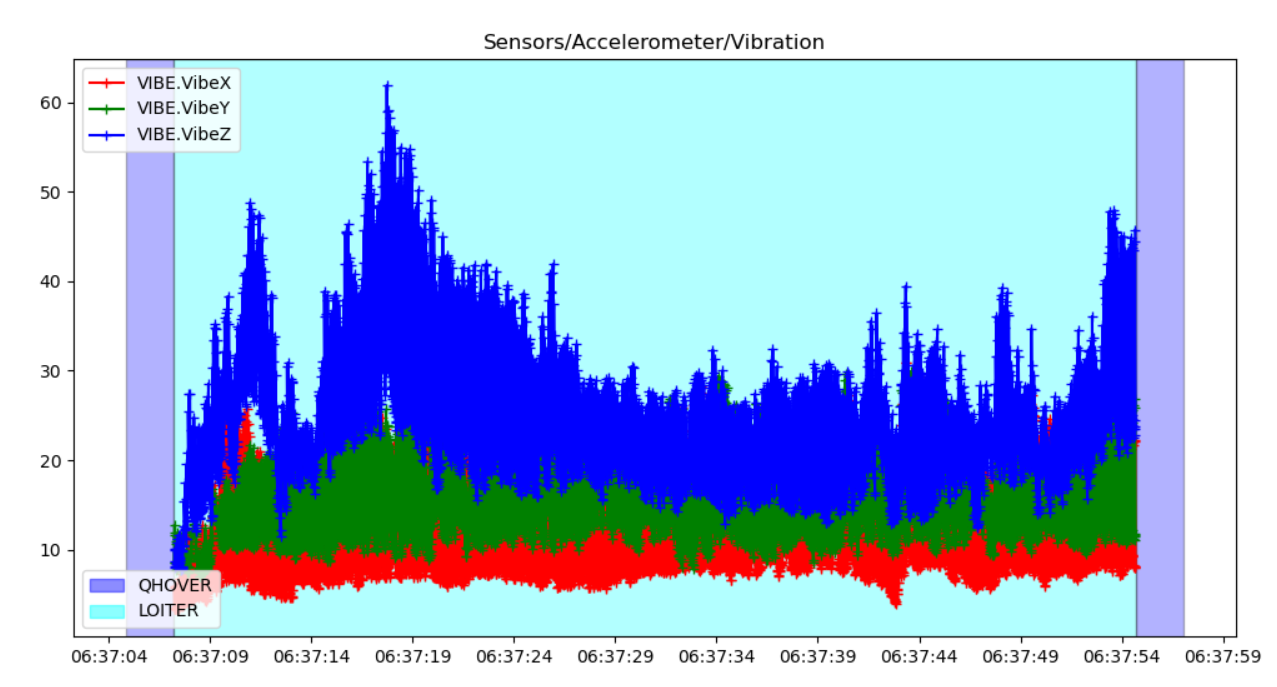
Z-axis vibrations went above 60 during transition, because engine was running at full throttle. I can’t do much about this, So if anyone has any suggestion then please let me know. But I checked the 50% engine throttle vibrations and they are around 30, which are acceptable I guess.
-
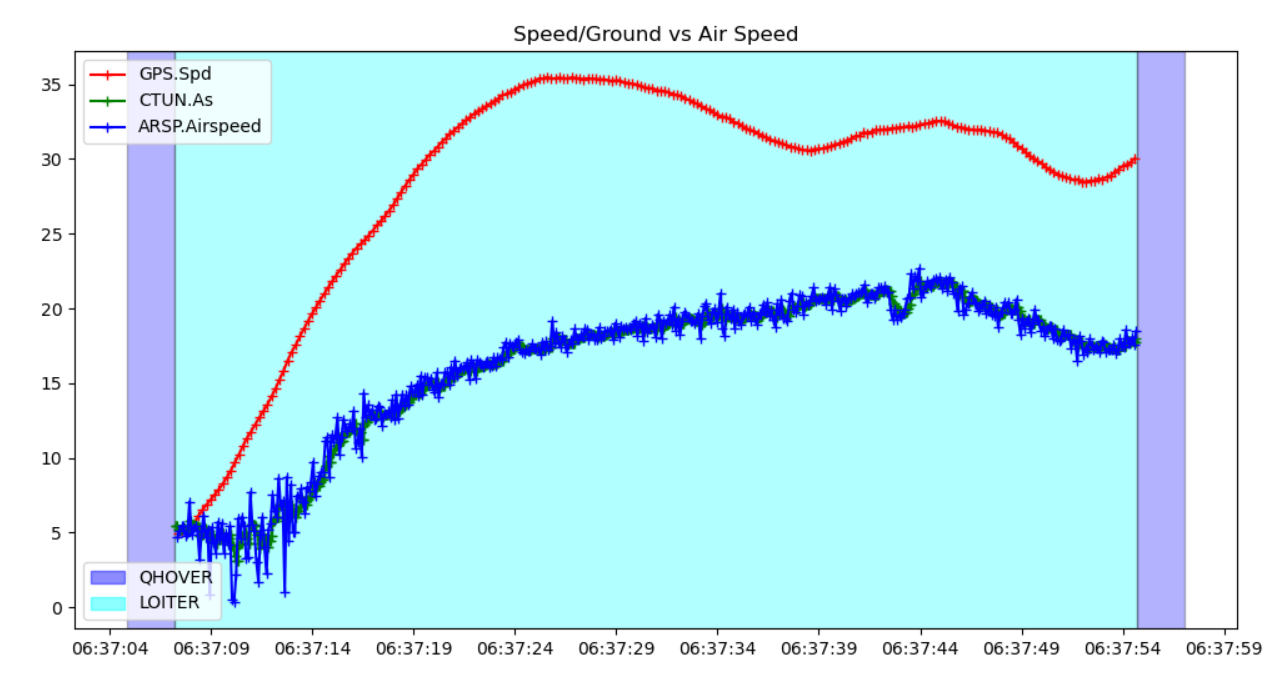
There is big difference between GPS measured speed and Airspeed sensor data.
Apart from this, transition was smooth and if anyone can give some insight on this after seeing the logs then it would be really nice as I don’t know much about what to look for. Although at the end of flight the drone was crashed, Motor 1 came out from the frame I don’t know how it got loose as I have flown this drone few times and I checked the every bolt before flight. I am guessing that It might got loose because of vibrations.
Any insight, suggestion, views, and help would be much appreciated.
I don’t know why @dkemxr is not responding but If it is that I asked too much or disturbed/irritated you much then I am really very sorry for that. Anyway It was nice taking with you.
I am hoping that community will help me in this. I want to make this drone fly, it is already damaged but I am trying to fix it and I just need your guidance and support to make it fly.
Thanks in advance!