ArduPlane VTOL Can it support the frame in the picture
No elevons
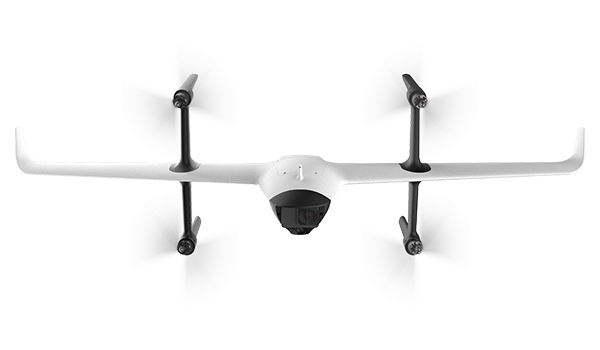

yes, recommended to have ailerons tho otherwise you cant glide if a motor fails.
Q_FRAME_CLASS = ?
How to set the motor
SERVO1_FUNCTION=?
SERVO2_FUNCTION=?
SERVO3_FUNCTION=?
SERVO4_FUNCTION=?
thank you
https://ardupilot.org/plane/docs/guide-tailsitter.html#quad-x-motor-tailsitter
Also worth reading the thread:
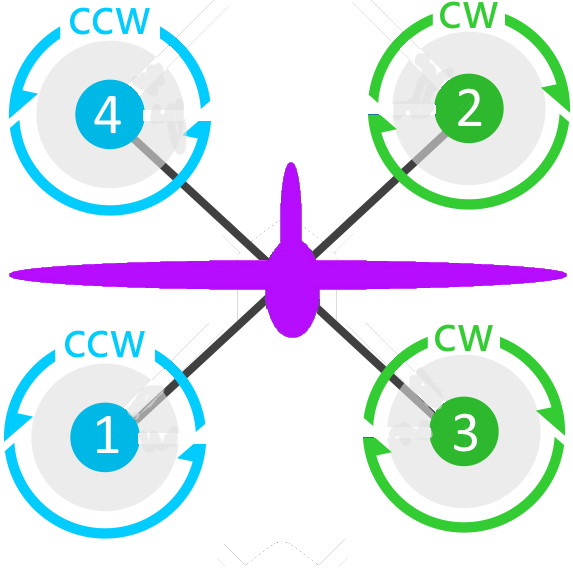
Q_FRAME_CLASS = 1
Q_FRAME_TYPE = 1
Q_TAILSIT_MOTMX = 15
Q_A_ANGLE_BOOST = 0
SERVO1_FUNCTION=33
SERVO2_FUNCTION=34
SERVO3_FUNCTION=35
SERVO4_FUNCTION=36
SERVO5_FUNCTION=77
SERVO6_FUNCTION=78
Is this setting correct?
thanks

1 Like
yes
it depends on how you have plugged in all your servos/escs, you can use motor test to check, just as with a copter.
So Q_FRAME_CLASS = 1 instead of Q_FRAME_CLASS = 10
yes, Q_FRAME_CLASS = 1
Thanks for your help, tomorrow I will test the flight
I can only use
Q_RC_SPEED = 50
Q_RC_SPEED=490 Servo is unstable
board Omnibus F4 V3
Today’s test flight found a problem. Yaw almost didn’t work. Should motor 2 be changed to CCW and motor 4 to CW? Is there a problem with the Wiki configuration?
if it worked a bit then its right. Having a motor wrong would result in uncontrollable spinning.
You will have to tune the PIDs
Won’t it be a problem with this configuration as when yaw is desired, roll action will also take place. Or is it that we very slow motion with fine tuning won’t couple yaw with roll?
Q_A_RAT_YAW_P : 0.5
Q_A_RAT_YAW_l : 0.05
Q_A_RAT_YAW_D : 0
Q_A_RAT_YAW_FF : 1.0
Q_YAW_RAT_MAX : 180
Q_A_ACCELY_MAX : 72000
yaw is still the same almost useless
Change to Q_FRAME_TYPE = 0 is no problem, it may be that the elevons have a greater effect on the airflow

Hey @adam, great work.
Can you share a flight video if possible? Is Roll action having an effect on Yaw motion or vice versa in the above " + " type configuration?
4 Likes
@adam Awesome! It’s super stable! Keep it up!
When are you planning for transition to fixed wing? Would love to see that!
The weather is not good these days, it is raining and the wind speed is 14m/s
Maybe next week
1 Like