And that clarity can be in the form of a pull request to the ardupilot methodic configurator ![]()
1 Like
Yes. I suppose there would be a matrix here depending on the processor and whether it has an Sd card or not. Checking all the boxes as some have done produces some giant log files.
Would be nice if F4’s go away ![]()
I could detect the processor type, and could detect if a SDCARD is present, and automatically select the correct values. But I do need to know the contents of that matrix @iampete
1 Like
My goto is INS_RAW_LOG_OPT = 1. Pre-filter primary only. If your dropping log messages then use batch logging.
You never want to set raw IMU in LOG_BITMASK (unless your on a old firmware without INS_RAW_LOG_OPT). This is because raw IMU logs both gyro and accels, INS_RAW_LOG_OPT is just gyro, so your logging rate is half.
If you have a H7 flight controller with multiple IMUs that run at different rates or are mounted differently than it might be interesting to use INS_RAW_LOG_OPT 2 for log all. The key thing here is to make sure your filters do still work if there is a EKF lane switch and you endup flying on a different IMU. If there is a big difference you may prefer disable the IMU rather than compromise on the filters.
If your feeling very thorough you might do a pre-post filter flight after doing all your filter setup. This is just to confirm that the estimated post filter in the tool matches the logged post filter with the same settings. If it does then the tool did a good job and using it to setup your configuration from just pre-filter is valid. If there is a big difference then there is a bug in the tool and it may have been giving you bad feedback (if you see this I want the log to fix the bug). But mostly I would not bother with this if your using one of the more tested code paths like throttle or ESC tracking.
So, set INS_RAW_LOG_OPT, 1 (or 9 for pre & post)
Disable batch Logging:
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
And don’t check Fast Harmonic Notch Logging in the LOG_BITMASK. And of course no Raw IMU.
1 Like
Had increased it to 6000 but that didn’t help so it’s back to 3000
Finally gps issue solved no more gps still configuring issues.
We did this fresh magfit flight after solving our gps and compass inconsistent issues. With the logbitmask you mentioned and made more sense
Have a look at the results if they are good then we can proceed to step 26 quick autotune in the ardupilot Methodic configurator.
Log - MAGFIT FLIGHT POST FIXING GPS ISSUES.BIN - Google Drive
Prams -25_inflight_magnetometer_fit_results.param.param - Google Drive
@amilcarlucas I have updated few things till step25, will be proceeding to step 26 tom, you can have a look at the fresh files tryign to slowly do the editor window also.
That gives a good magfit now.
Use offsets+iron, no motor comp.
COMPASS_OFS_X,25.675009
COMPASS_OFS_Y,71.87149
COMPASS_OFS_Z,146.37878
COMPASS_DIA_X,1.0697544
COMPASS_DIA_Y,1.0211502
COMPASS_DIA_Z,0.9090954
COMPASS_ODI_X,0.013908566
COMPASS_ODI_Y,-0.081173204
COMPASS_ODI_Z,-0.026707996
COMPASS_MOT_X,0
COMPASS_MOT_Y,0
COMPASS_MOT_Z,0
COMPASS_SCALE,0.99851793
COMPASS_ORIENT,0
COMPASS_OFS2_X,-46.347263
COMPASS_OFS2_Y,167.36194
COMPASS_OFS2_Z,92.01478
COMPASS_DIA2_X,1.0446886
COMPASS_DIA2_Y,1.0490843
COMPASS_DIA2_Z,0.90622705
COMPASS_ODI2_X,-0.013731723
COMPASS_ODI2_Y,0.005221321
COMPASS_ODI2_Z,-0.024095992
COMPASS_MOT2_X,0
COMPASS_MOT2_Y,0
COMPASS_MOT2_Z,0
COMPASS_SCALE2,1.0021896
COMPASS_ORIENT2,0
COMPASS_MOTCT,0
i will not be using compass 3 so will be disabling that
but why are our values coming different @xfacta
COMPASS_OFS_X,23.963295
COMPASS_OFS_Y,71.69849
COMPASS_OFS_Z,93.519295
COMPASS_DIA_X,1.0132995
COMPASS_DIA_Y,0.96433747
COMPASS_DIA_Z,1.0223631
COMPASS_ODI_X,0.0127277635
COMPASS_ODI_Y,-0.08681976
COMPASS_ODI_Z,-0.02354561
COMPASS_MOT_X,0
COMPASS_MOT_Y,0
COMPASS_MOT_Z,0
COMPASS_SCALE,1.0515172
COMPASS_ORIENT,0
COMPASS_OFS2_X,-48.29153
COMPASS_OFS2_Y,165.23933
COMPASS_OFS2_Z,62.095303
COMPASS_DIA2_X,1.0095966
COMPASS_DIA2_Y,1.0219473
COMPASS_DIA2_Z,0.9684561
COMPASS_ODI2_X,-0.016041651
COMPASS_ODI2_Y,0.00873008
COMPASS_ODI2_Z,-0.015245268
COMPASS_MOT2_X,0
COMPASS_MOT2_Y,0
COMPASS_MOT2_Z,0
COMPASS_SCALE2,1.0310357
COMPASS_ORIENT2,0
COMPASS_OFS3_X,-128.88606
COMPASS_OFS3_Y,-354.7067
COMPASS_OFS3_Z,421.68326
COMPASS_DIA3_X,1
COMPASS_DIA3_Y,1
COMPASS_DIA3_Z,1
COMPASS_ODI3_X,0
COMPASS_ODI3_Y,0
COMPASS_ODI3_Z,0
COMPASS_MOT3_X,0
COMPASS_MOT3_Y,0
COMPASS_MOT3_Z,0
COMPASS_SCALE3,1
COMPASS_ORIENT3,2
COMPASS_USE3,0
COMPASS_MOTCT,0
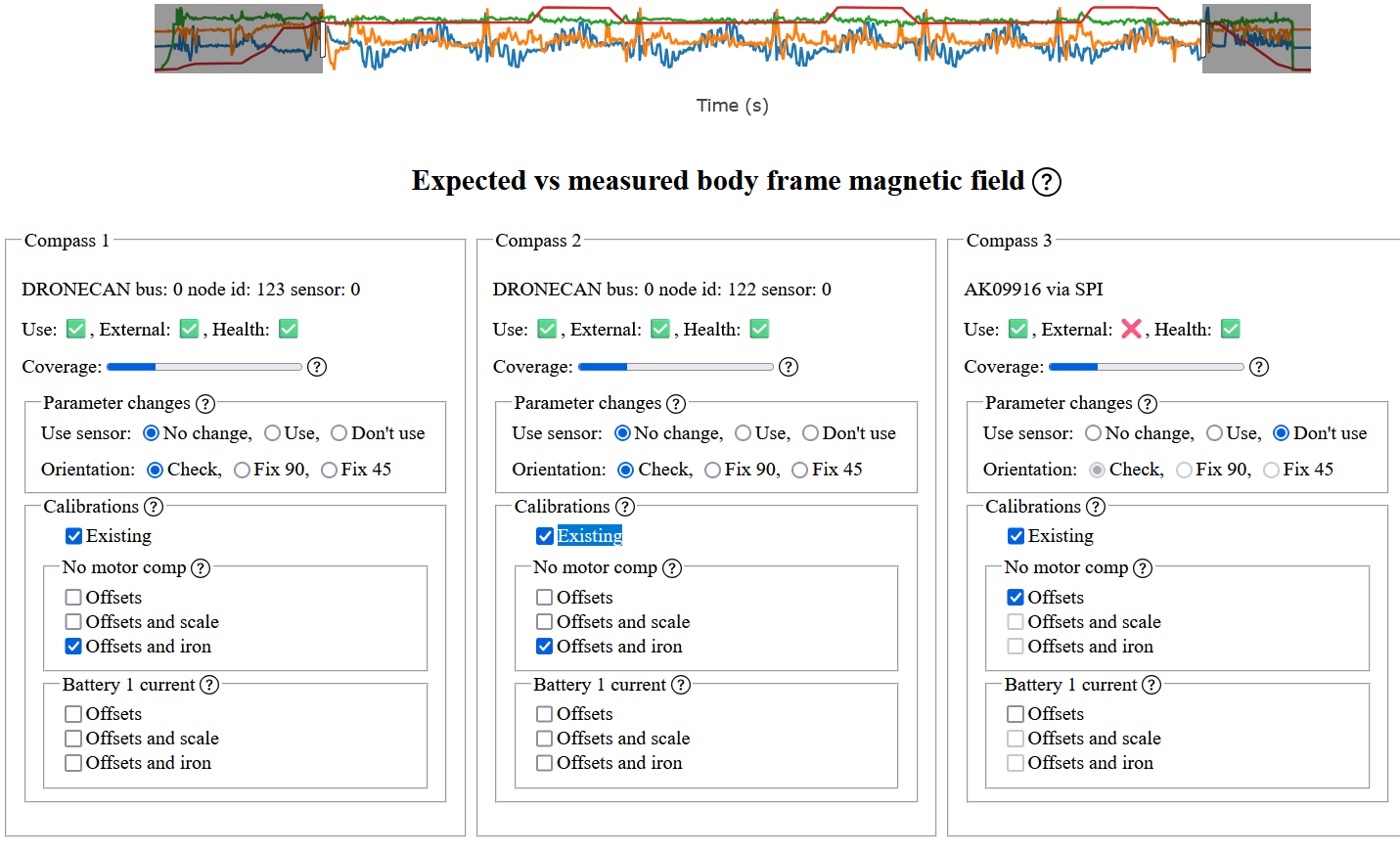
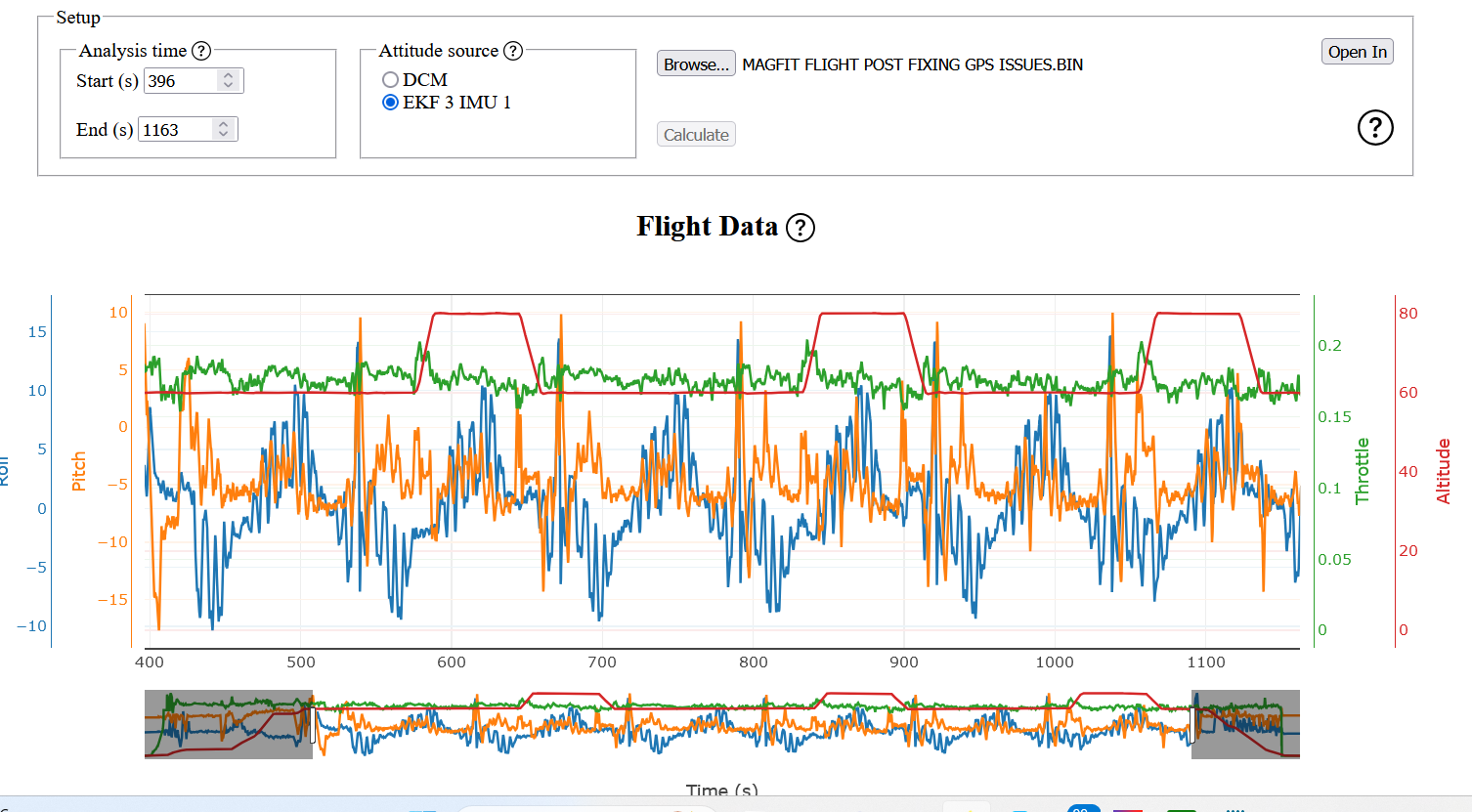
The values are not identical but near enough. I used the whole log, however you selected just the Auto part of the log.
Use your values, and I agree with disabling the internal compass.
Great great so shall use these settings and start tomorrow again from post magfit results
so we further tuning of the drone.
attaching logs and zip file @amilcarlucas you can update in the software.
@amilcarlucas when we put the min take off weight and max in the editor window of the software does that do the changes in the input shaping pram or do i have to do that separately.
Also have a look at the log, but somehow attitude logging was off.
log–last final flight .BIN - Google Drive
Software files-x11+ software files - Google Drive
Thanks for the files.
You need to do that separately, the software has no means to know the current vehicle TOW
That input shaping formula depends on the current TOW as as such is not static…
Ok so will make the input changes manually.
Because at times drones will be at min takeof weight 35kgs and at times with max 50kgs.
Will do attitude logging flight and later share a bin then we can see if further thing required.
I have used @bill we tool around step 46 for fine tuning as of yet on this drone
@sauravhobyy This is not a good reason changed:
THIS WAS WORKING WELL IN OUR PREVIOUS SIMILAR DRONE SETUP ALSO
You should document why that parameter had that value on your previous similar drone, and not just say that is is similar to the previous. It must have a reason why it was that value in the previous drone.
did you calibrate the ESC? Usually big ESCs have a fixed range and accept no calibration.
Ok I will sit on this and understand the reasons and write them
It’s inbuilt hobbywing esc itself and no docs related to its calibrations
Then my previous reason changed was correct and your new reason changed is incorrect. I will do a software release with the correction soon
I just released version 1.0.10 with fixes. Please switch to that version and create a new vehicle based on the template. I did correct some of your other parameters
No, use 1.0.15 instead please