HI
I have assembled a quadcopter like my previous models using x11plus hobbywing motors.
this is new issue that i am facing.
after arming the drone as we are putting throttle input the drone is trying to yaw to its right while the landing gear on ground and this quad is big 43inch prop so we are not able to takeoff because of this yaw issue.
attaching a log for the same if anyone can give some input.
i have used ardupilot_methodic_configurator and followed all steps
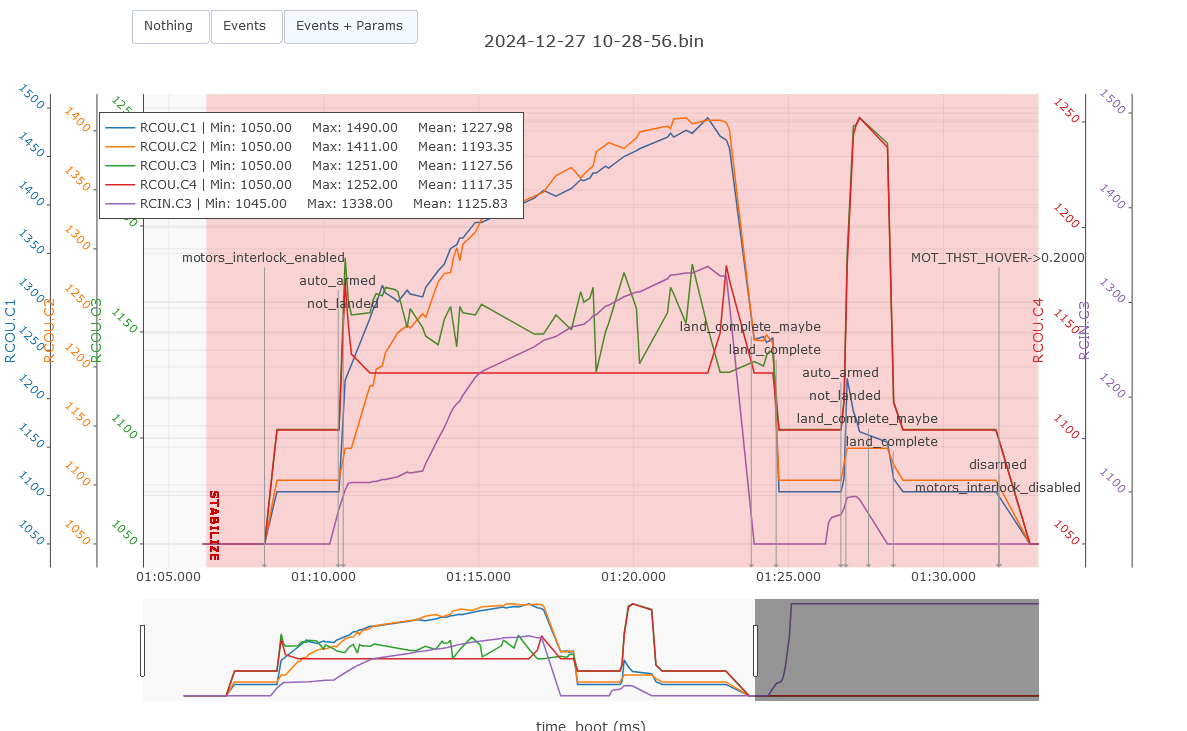
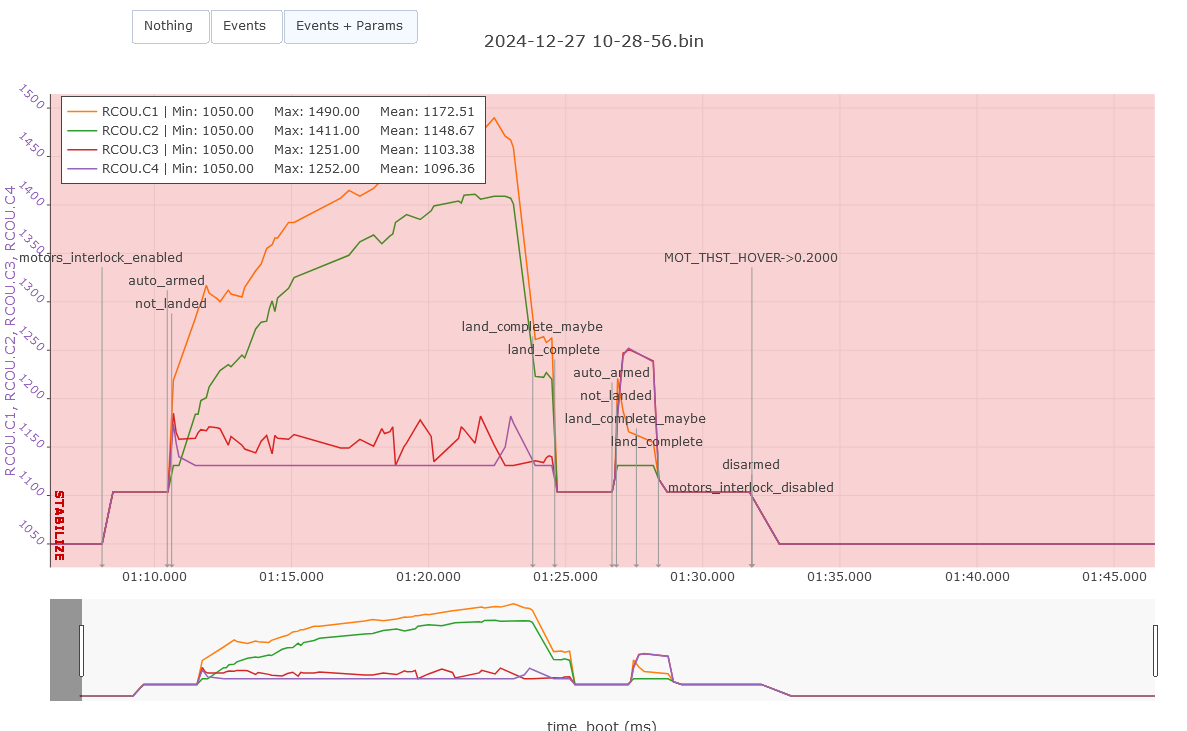
output from autopilot post arming the drone RCOUC1,C2,C3,C4 should be around 1450pwm but on c1+c2 had gone to that value while c3,c4 were struggling.( i dont know the reason )
RCIN3(throttle) after arming when being taken close to 1200pwn the drone started yawing clockwise while being on ground.
Twisted motor arms. Please make sure all motors and props are 100% leveled. If they are not leveled it will cause the yaw imbalance that you are seeing.
Search this forum for “yaw imbalance” for more info.
we used the iphone level sensor to level the motors all 4 motors leveled and tips of are at same level, motor ordering and number is also fine because when we do the MP motor test a,b,c,d all are roatatingas per document.
here in this drone we can notice that RCOU4 is quiet a straight line.
porps are from hobbywing itself that came along with the motors. all specs of props is same as our previous drone which we made.
only difference here is that we are using CAN connection instead of servo line in cube orange.
There must be something else different as well. CAN alone does not account for this issue, unless the processor load is very hight. How did you configure your INS?
INS_FAST_SAMPLE,3 # Both IMUs can run fast on the CubeOrange flight controller
INS_GYRO_RATE,2 # The CubeOrange can do 4KHz here
INS_HNTCH_ATT,40 # as per my prevsion same setup dorne
INS_HNTCH_BW,12 # as per my prevsion same setup dorne
INS_HNTCH_ENABLE,1 # Use the first notch filter to filter the noise created by the motors/propellers
INS_HNTCH_FREQ,28 # Use 1.4 * INS_GYRO_FILTER as a first guess
INS_HNTCH_HMNCS,3 # as per my prevsion same setup dorne
INS_HNTCH_MODE,1 # Trottle based notch
INS_HNTCH_OPTS,1 # as per my prevsion same setup dorne
INS_HNTCH_REF,0.12 # as per my prevsion same setup dorne hover thrust
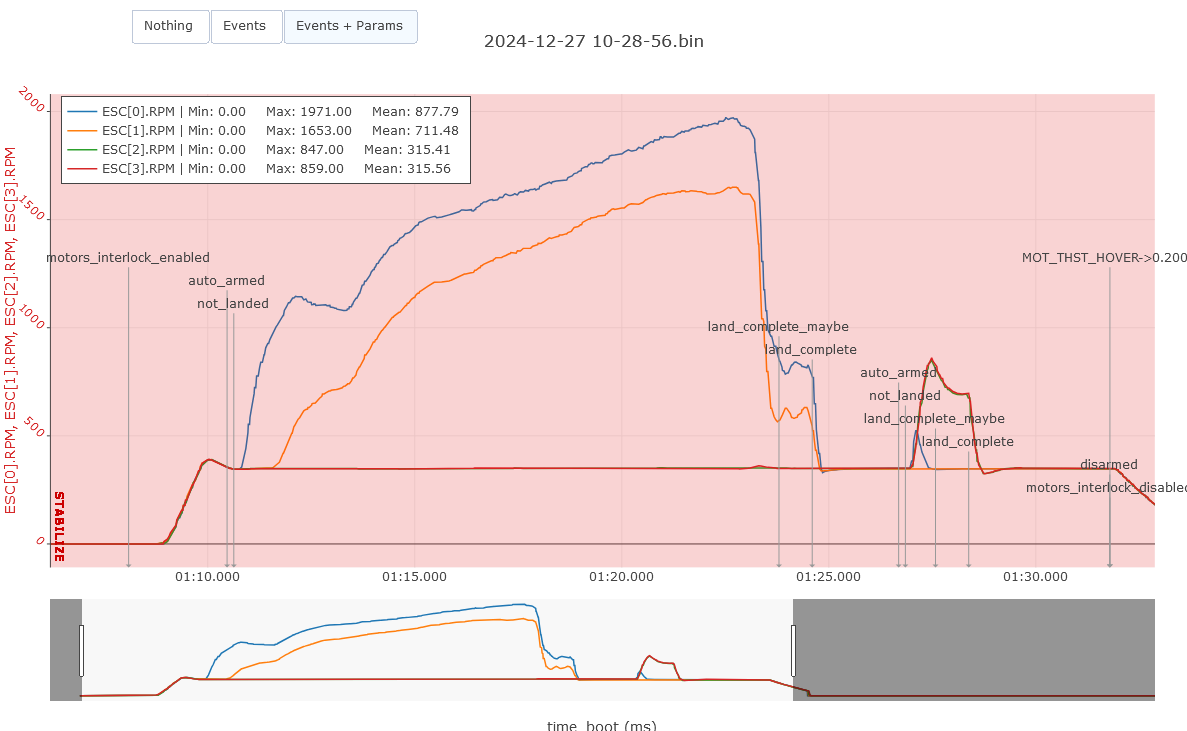
NO we were not able to takeoff. we armed the drone in stablize mode as per docs. and when the throttle stick is centred all 4 props moving at spin_arm pram but as soon as we incase the throttle input ch3 the drone while on ground is trying to yaw which is noticed visually by the whole drone trying to yaw to right and also visually 2 props rotating very slow
2 herehex4 gps about 10cm away from each other, 4 cm left and right of cube orange and 4cm above cubeorange.
only rx of mk32 radio and power cable to AP is close to gps(5cm away)
its the same place where our last gps were set in the same drone frame