@amilcarlucas @xfacta
So we did test flying today and started from file 18 notch filter setup from the ardupilot methodic configurator
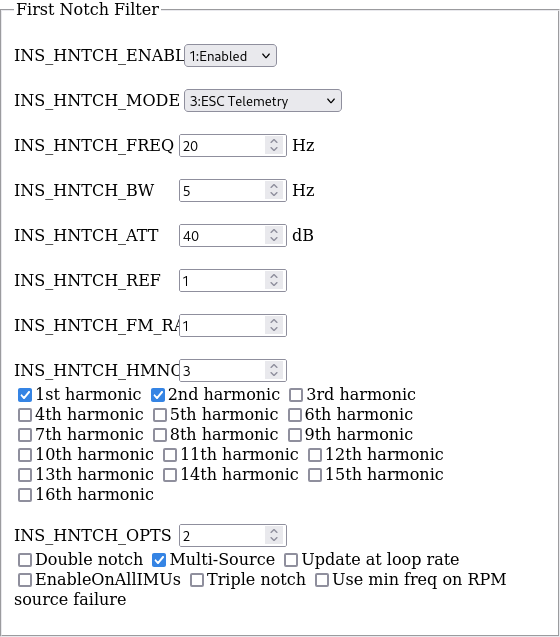
our final prams for filter seeings are below
INS_GYRO_FILTER,15
INS_HNTCH_FREQ,20
INS_HNTCH_BW,5
INS_HNTCH_ATT,40
INS_HNTCH_REF,1
INS_HNTCH_FM_RAT,1
INS_HNTCH_HMNCS,3
INS_HNTCH_OPTS,2
INS_HNTCH_ENABLE,1
INS_HNTCH_MODE,3
There after we did the steps and reached quicktune and was done successfully (no altitude oscillations this time)
Then we setup the drone for the file 24 magfit flight.
we used the web tool to get the results and then saved in the directory and uploaded it to fc using the software.
Next was again quicktune(step26/27) post magfit flight but now the issues started and shared below
1- Compasses inconsistent
2- gps1/2 still configuring errors kept pooping up
Due to this of course we were unable to arm the drone.
Then we did a compass dance and we were able to arm the drone and we did another magfilt flight at the same location without any changes(enabled internal compass 3)
From the webtool we got different results for both Magfit flights ( reasons not known would love to know)
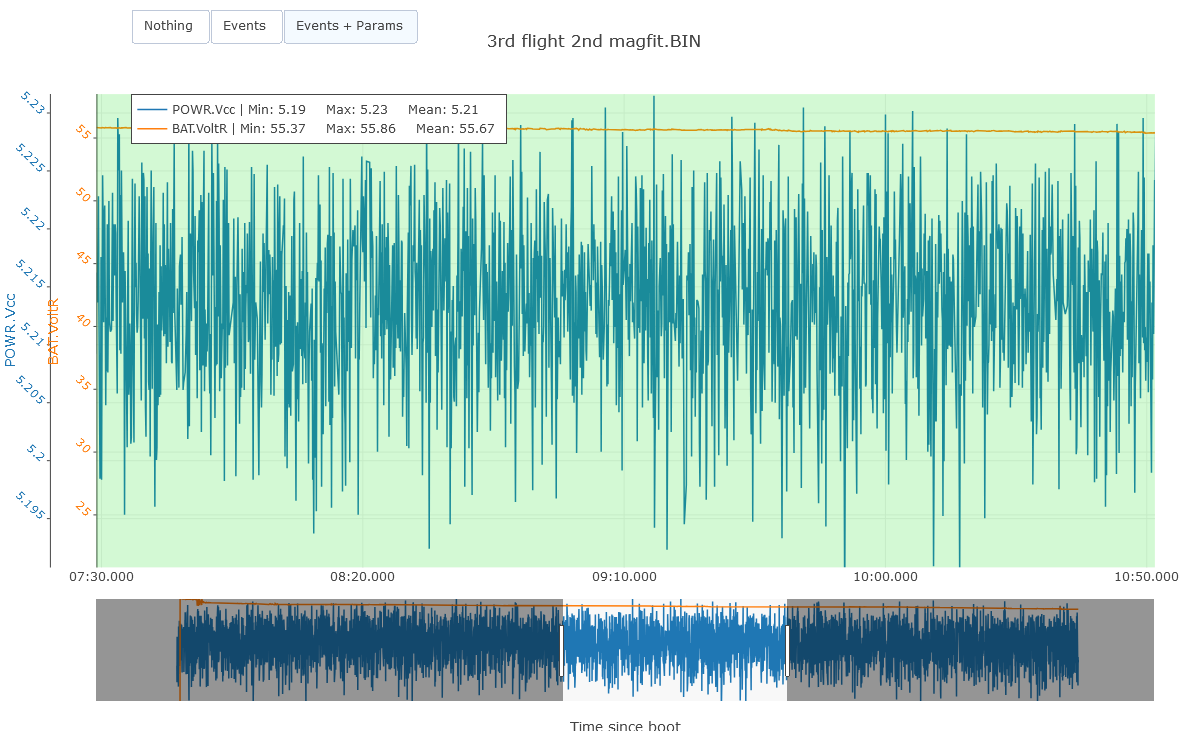
We took the data from this second magfit flight and saved on the FC using the software and then proceeded to next step of quicktune post magfit but again we got same both errors Compasses inconsistent(heading should be 301* but was showing 315* and GPS1/2 still configuring ( external power to splitter5.35v)
i have also made a log when drone was disarmed for gps and compass issues data logging. @amilcarlucas @xfacta can you have a look as suggest.
So i am attaching differet prams and logs for reference -
1- first magfit flight log-1st magfit flight .BIN - Google Drive
2- first magfit flight results - first magfit result.param - Google Drive
3- compass dance results- compass dance prams.param - Google Drive
4- second magfit flight log- 2nd magfit flight .BIN - Google Drive
5 second magfit flight results- second magfit result.param - Google Drive
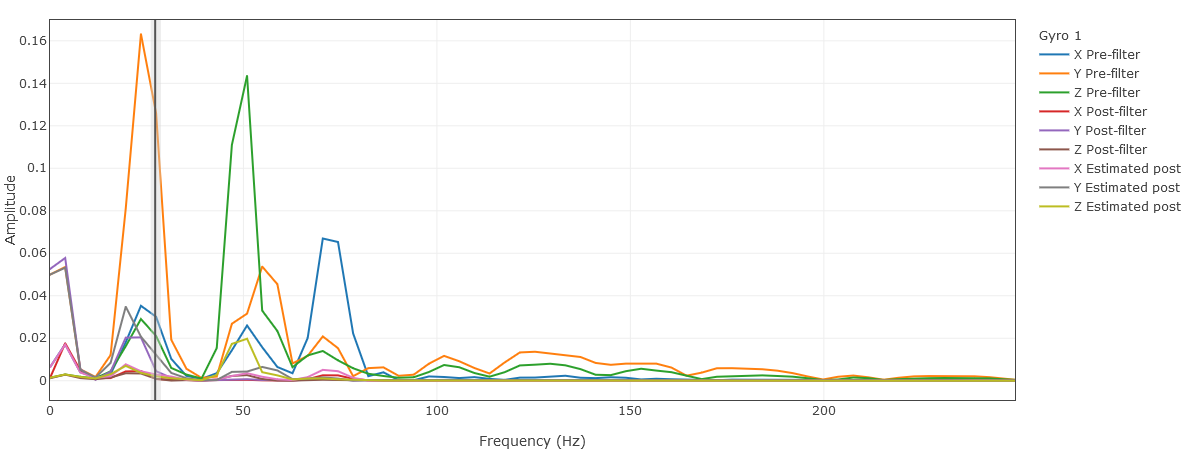
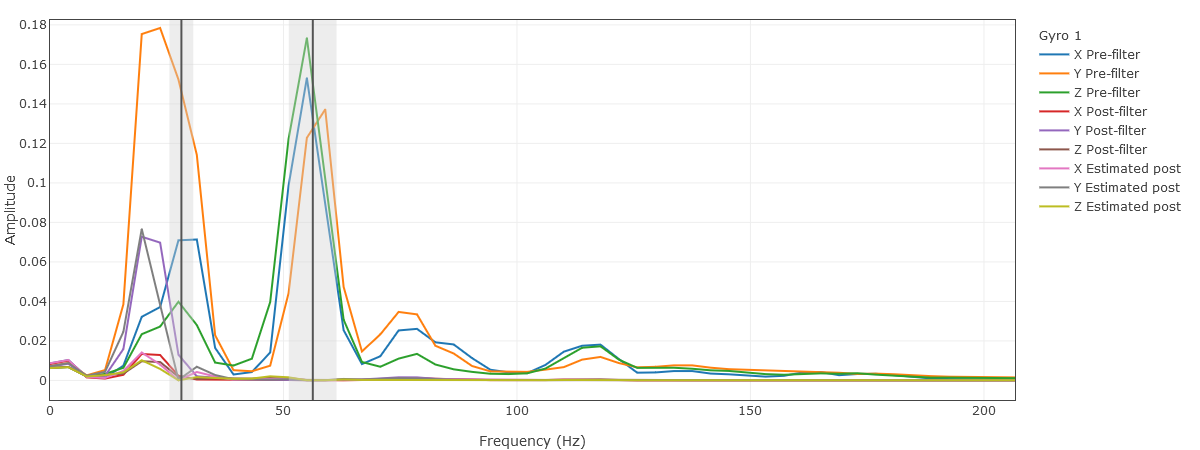
6- notch filter 1st flight log - 1st flight notch filter.BIN - Google Drive
7- disarmed log -disarmed log, gps configuring, compass incoss.BIN - Google Drive
8- ardupilot methodic configuration file- x11+ software files - Google Drive
FYI - our GPS is 5cm above the autopilot and no wiring touching the gps but air unit reciever is about 3cm below gps1, and wiring goign to FC below gps almost 5cm away.
I am increasing the height of GPS units by another 5cm above the FC(5+5=10cm) and wiring
raising the gps another 5cm