Do you allow me to review, improve and distribute your configuration files as part of ArduPilot Methodic configurator?
1 Like
Yes i am good with that. It will be helpful for others also so why not ![]()
Yes I Allow.
Hobbywing X11 CAN-bus version. Have you configure the motors?
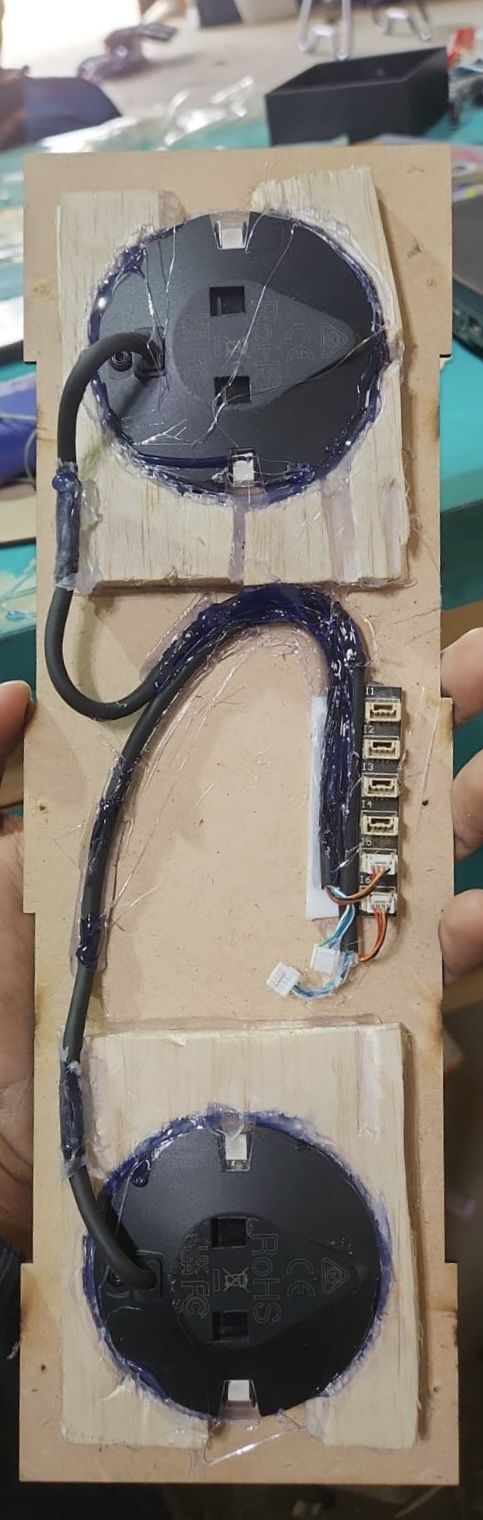
I need a single vehicle.jpg file that depicts the entire vehicle, not just the batteries ![]()
I corrected some stuff on the files, but I could not correct all of it because you saved a lot of time by not entering relevant data in the component editor. So I saved time by not fully reviewing it. ![]()
Yes I have configured the, the motor test is also working perfectly
In the drive itself ? Now I have copy those prams to the drone via your software or via Mp
No, install the latest version of the software it contains a new hirose_x11+ template. Open it and use the software to upload the improved files to the vehicle.
It highlights the changed parameters so that you will be able to learn something.
Never use mp to upload methodic configurator files to the vehicle. That fully defeats the purpose of the software.
1 Like
Ok understood ![]() thanks
thanks
And this time add ALL the missing details on the component editor window.
I don’t know why we skipped or how did we manage to do that, but I will fill every detail this time so that I get the process right
1 Like
Hi, check that the motors are rotating in the correct direction and that the propellers are correct. Last but not least, check the ESC settings
We started with this today fresh. The yaw and roll during take off was rectified and it was our side error due to which it was happening. the drone was on flat surface but the HUD read nose down5* and roll right 3-5*. on seting this we did the simple level calibration . after this the take off was normal no yaw tendency.
i have followed the tuning guide step by step and reached. Step/File- 27(quick tune results) log - Logs for FLights - Google Drive
Issues -
During the quick tune before magfit and after magfit in both cases the compass variance was exceeding its limits and drone was changing( ganing and losing ) altitude Rapidly.
I will be changing the position and covering of the gps for tomorrow tuning flight.
The spin_min=0.1 and hover_thst is=0.12
As per my understanding and feel i guess put about 2-3 kgs of dead load because this craft is overpowered. (maybe i am wrong) in that case what msut but this issue.
Also , I was unable to arm the drone for long time after every time I do a reboot, GPS1/2 Still configuring errors keeps popping up inbetween after power on. This is the first time I am seeing this error and it take a long time to get normalised(7-11mins) meanwhile satcount is 30-32 and 0.5hdop
@amilcarlucas i am attaching the zip files of the Software and logs also. this can be used or updated in the template. i will keep updating the same drive link as i progress in my tuning.
link- x11+ software files - Google Drive
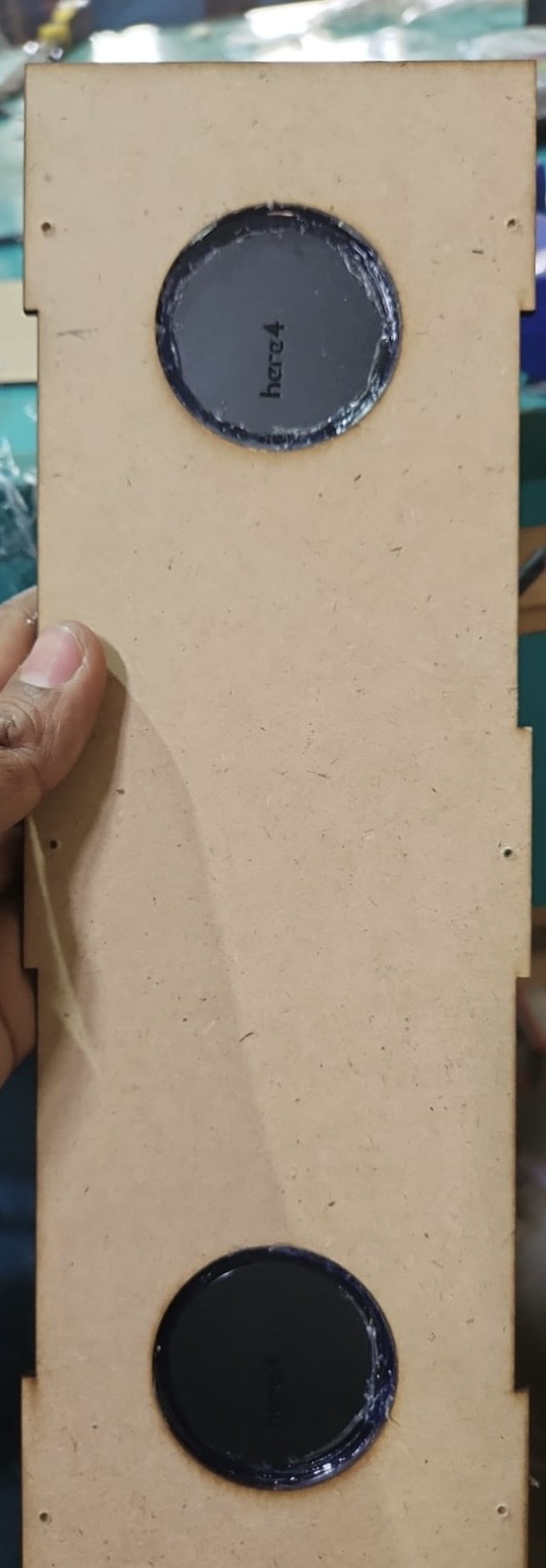
Do you think they are placed too near of each other? For RTK operation, manufacturer suggesting 30 cm apart. For your case you may be not into RTK, just wondering.
Yes, that would also be my suggestion.
Check the GPS power supply. Is the voltage high enough? Is the voltage stable?
Thanks for that, I will update them.
We put 5 kgs dead weight but didn’t help details below are the details.
As per last flight during quick tune before magfit and post magfit we have a lot of compass variance almost every time in red zone during qtune.
So now we relocated the gps and its position and wiring. And again started the tuning process from software from the first qtune flight setup
During the quick tune the compass variance issue is solved but just after quick tune the drone started oscillating in altitude rapidly we have to land the bird very carefully.
Issue -
Now that compass variance issue is solved
Why are we getting altitude oscillations after quick tune.
Log- before quick tune no oscillation in altitude and then it starts and increases post quick autotune
https://drive.google.com/drive/folders/1cVgQ9y4ncOK3k2rWgcQUURRt9aThZ1ic
Vibrations are unnaturally low. I suspect your antivibration mount is too soft.
Start test flights in AltHold until you’ve got everything more sorted out.
Practice in Stabilise mode too, there will be a day when you need it.
Once the copter is up in the air and flying predictably, change to Loiter.
Pitch and Roll angles are quite separated - level the copter across the tops of the motors by packing under the landing gear, then in MissionPlanner / Accel Calibration do Calibrate Level
There’s something going on with your battery voltage and regulated 5 volts (Vcc)
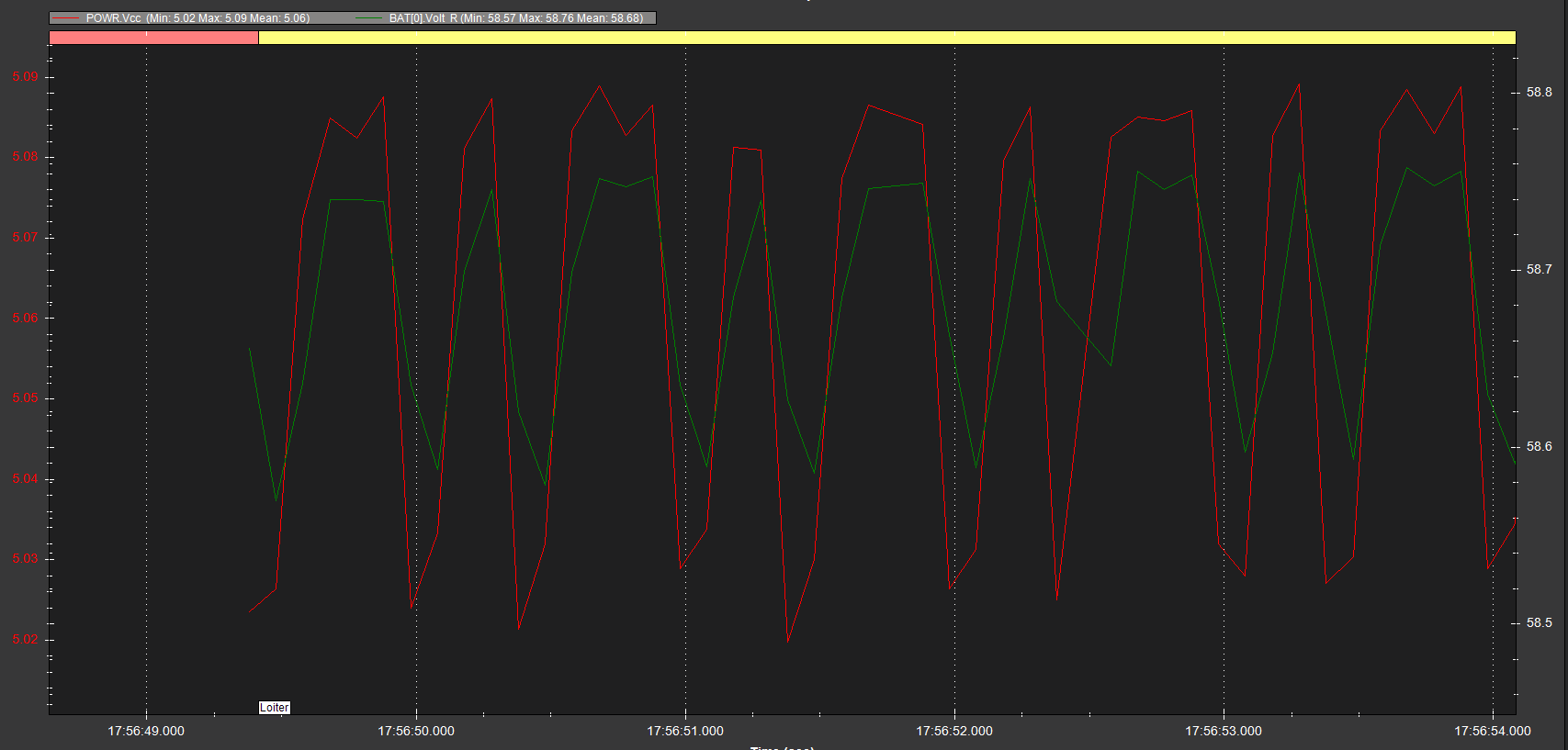
Do you have a bunch of high power LEDs flashing twice per second or something like that?
There is only a very small drop in battery voltage, but it flows through to the flight controllers power supply.
No, we do not have any such thing
As per software steps we were following it,
Before quick tune it was fine as per the logs also