another thing we noticed was that on MP screen as soon as post armign the drone we were giving it power the direct to heading wp was turning clockwise
Post pictures . Is the expected current level similar?
current flow from motor?? yes
Hi sauravhobyy
Have you tried to do the rc calibration after the yaw issue you noticed .
no it was done before
Are all components similar?
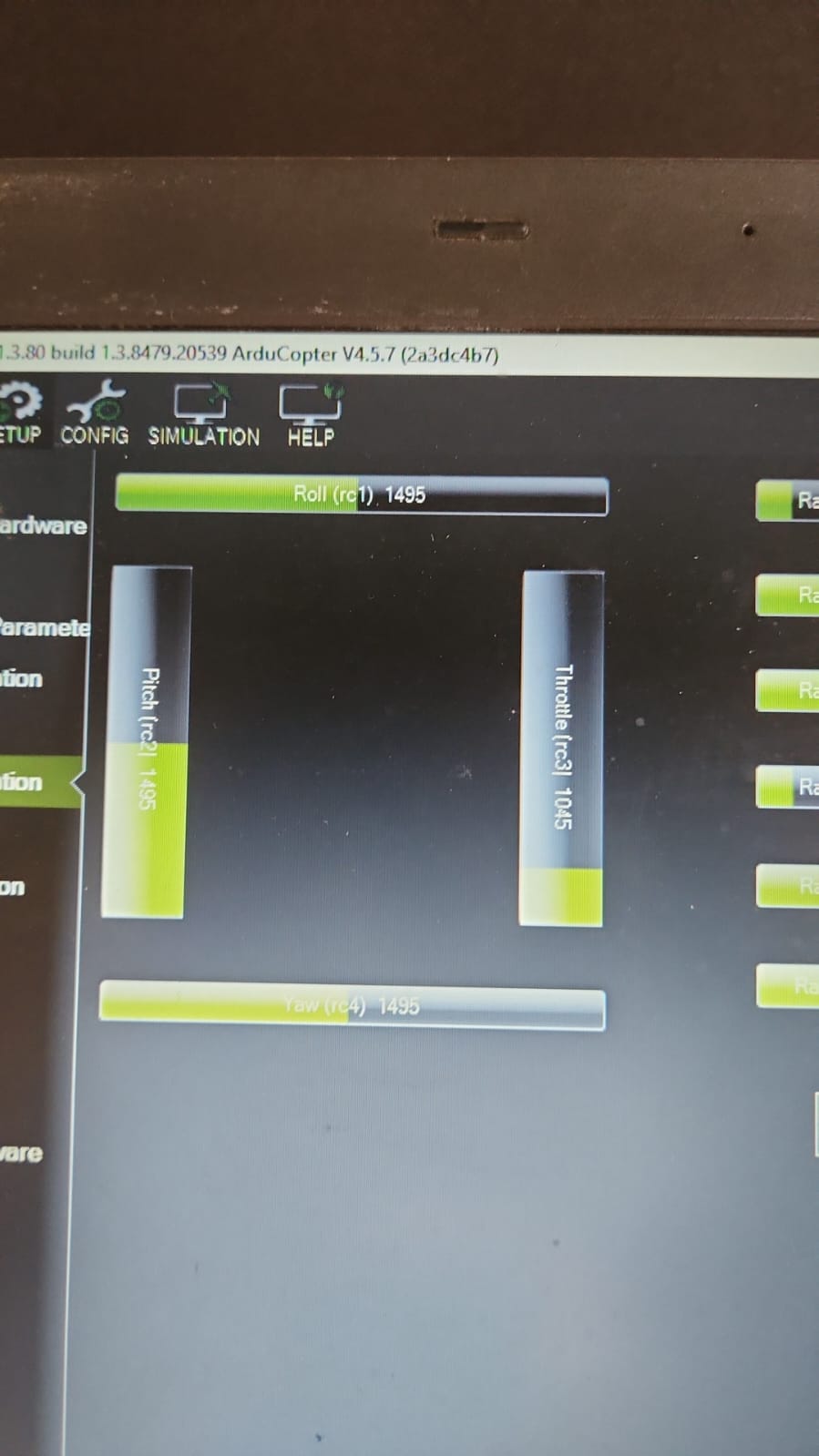
Good point. Are the RC transmitter trims centered?
Once try to do the rc calibration and check
yes cheked in the radio cal page it was all centred.
Ok, post the ArduPilot methodic configurator files, then we can see the components you used, how they are connected to the fc and how all is configured.
Include a vehicle.jpg file for good measure
shall i share all the 19files (sinve i have reached the 19th file) in drive each one.
https://drive.google.com/drive/folders/1qFDL5mg54tWeALxPrn2qIdYP_skJhX-r?usp=sharing
ardupilot_methodic_configurator full folder
this i shall share tommorow(in 15hrs)
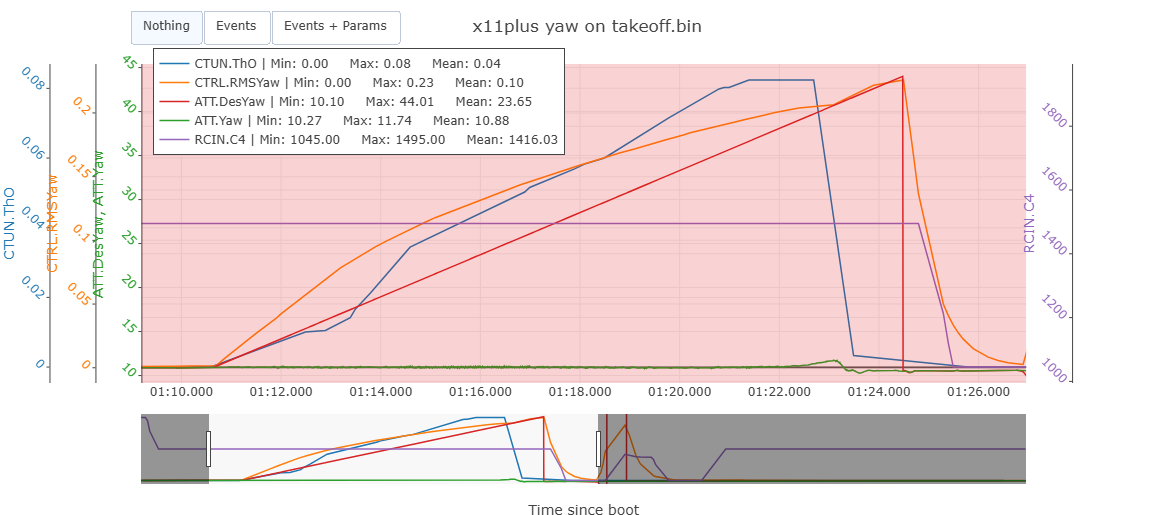
DesYaw is ramping from current value (~10 deg) up to nearly 45 degrees, apparently tracking throttle input. Yaw rate demand is following that, hence the motor imbalance. But I can’t see a reason for demanded yaw to change since RC4 stays neutral.
So I uploaded all the files of the software and followed it step by step and reached 18th step/file notch filter setup.
Wanted to know if I have followed the procedure properly …


We did this and no change still trying to yaw even before the drones gets off the ground
WE tried to take off today, a slight different issue.
it was trying to pitch nose fwd once and next time was trying toyaw/roll. still being on ground.
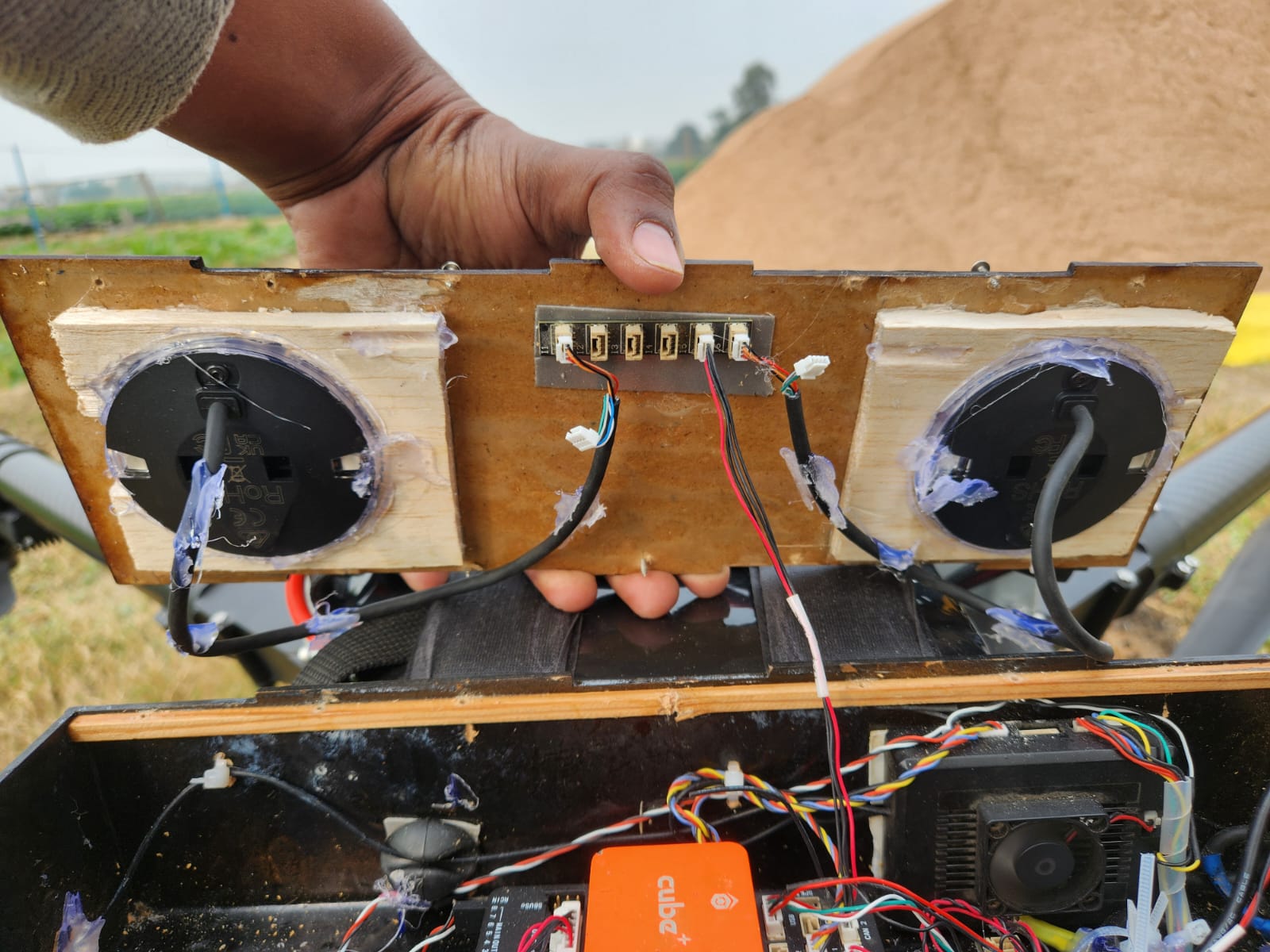
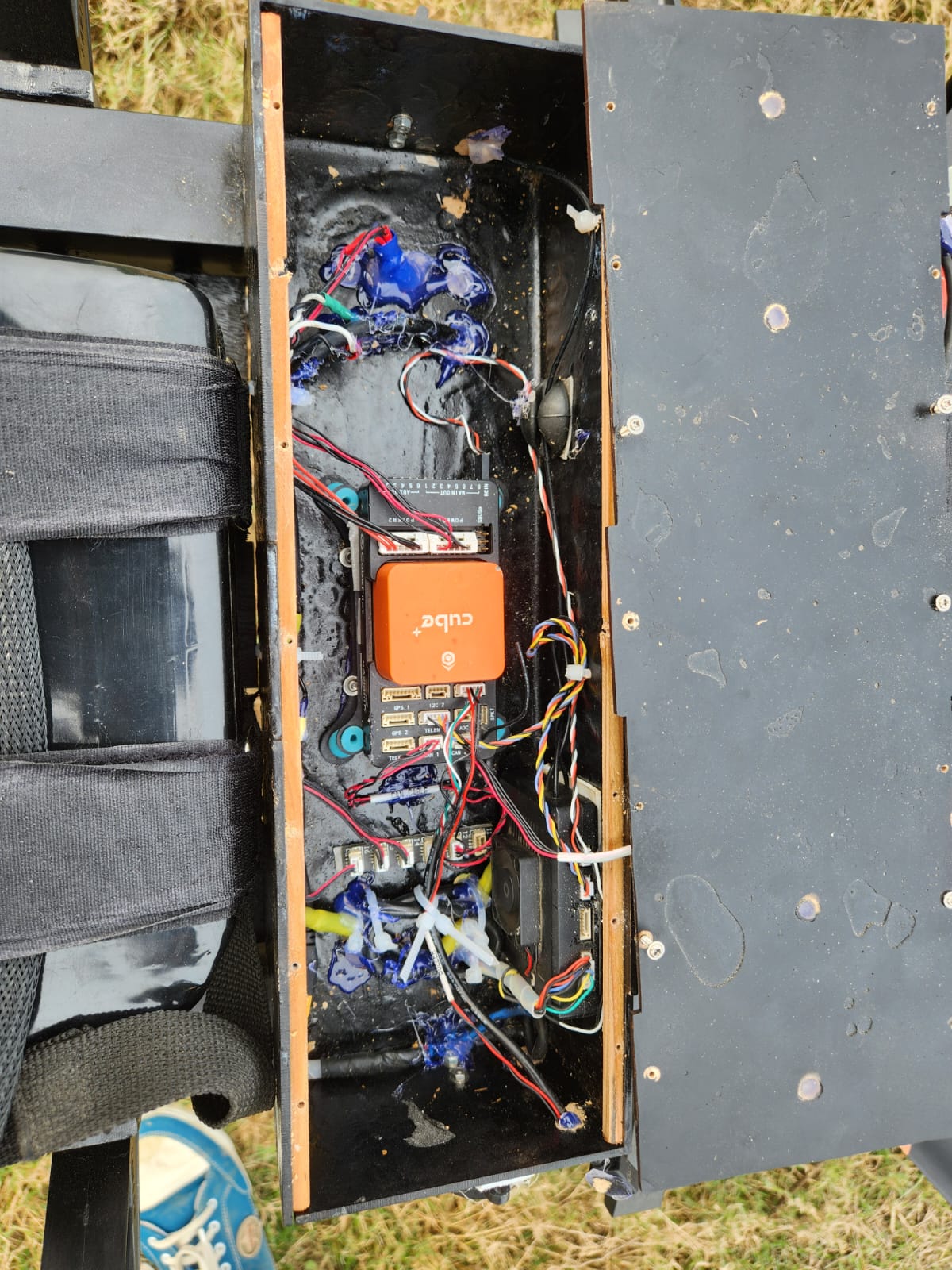
gps position and wires were cross checked no high current flow around gps, pics shared above.
attaching the logs for today’s test flight-X11INVE - Google Drive
everything shared above
thanks
i have made few quads but this time its the first that the drone is trying to do this funny things while being on ground.
the only difference is that in this drone i am not using the main out ports from autopilot. but using data via can1 port and 4 esc attached to the can splitter port