Today I did a first flight test with quad rotor (pixhawk 4) successfully. Flying is good.
But the motors temperatures are not same. Motor 1 and 3 gets more heat than the other two ( Motor 2 and 4 are temperature is fine).
When I take-off in stabilize mode the drone was slightly rolling to left side but as soon as I put loiter, its became stable and hold its position. I flew drone continuesly for more than 30 minutes.
Things used
450 frame
30 emax esc
BLDC 935 kv
8 inch prop
4s battery 3700 mah
Please let me know what shoul I need to do solve motor heating (1 & 3) problem.
Check the documentation for your receiver failsafe actions, it will probably be “hold all existing outputs” or something similar. You may have to bind the receiver again while the transmitter throttle channel is set to something like -110% (in OpenTX terms) or about 970 PWM using trim. Then set the transmitter throttle back to normal after binding and test the failsafe on the ground.
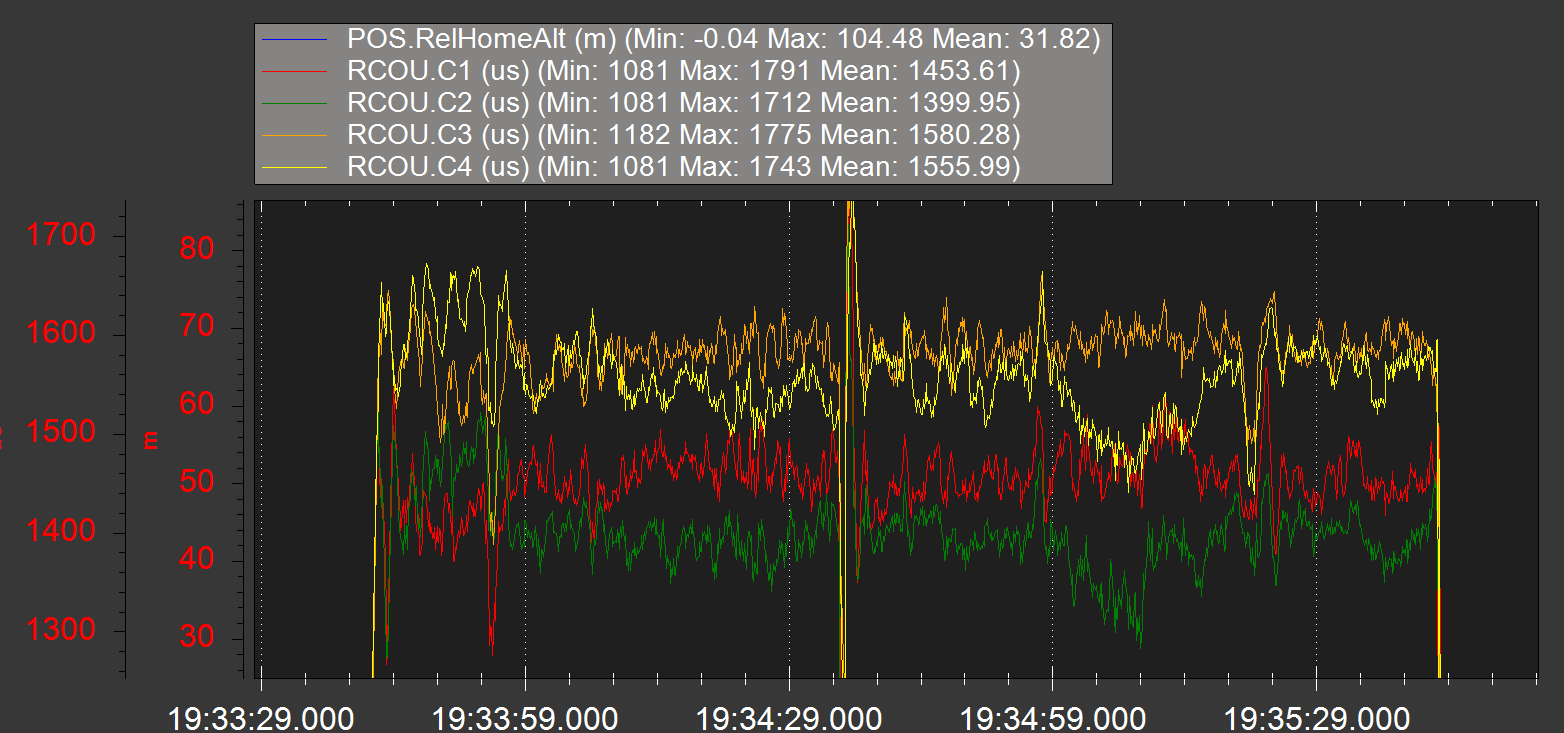
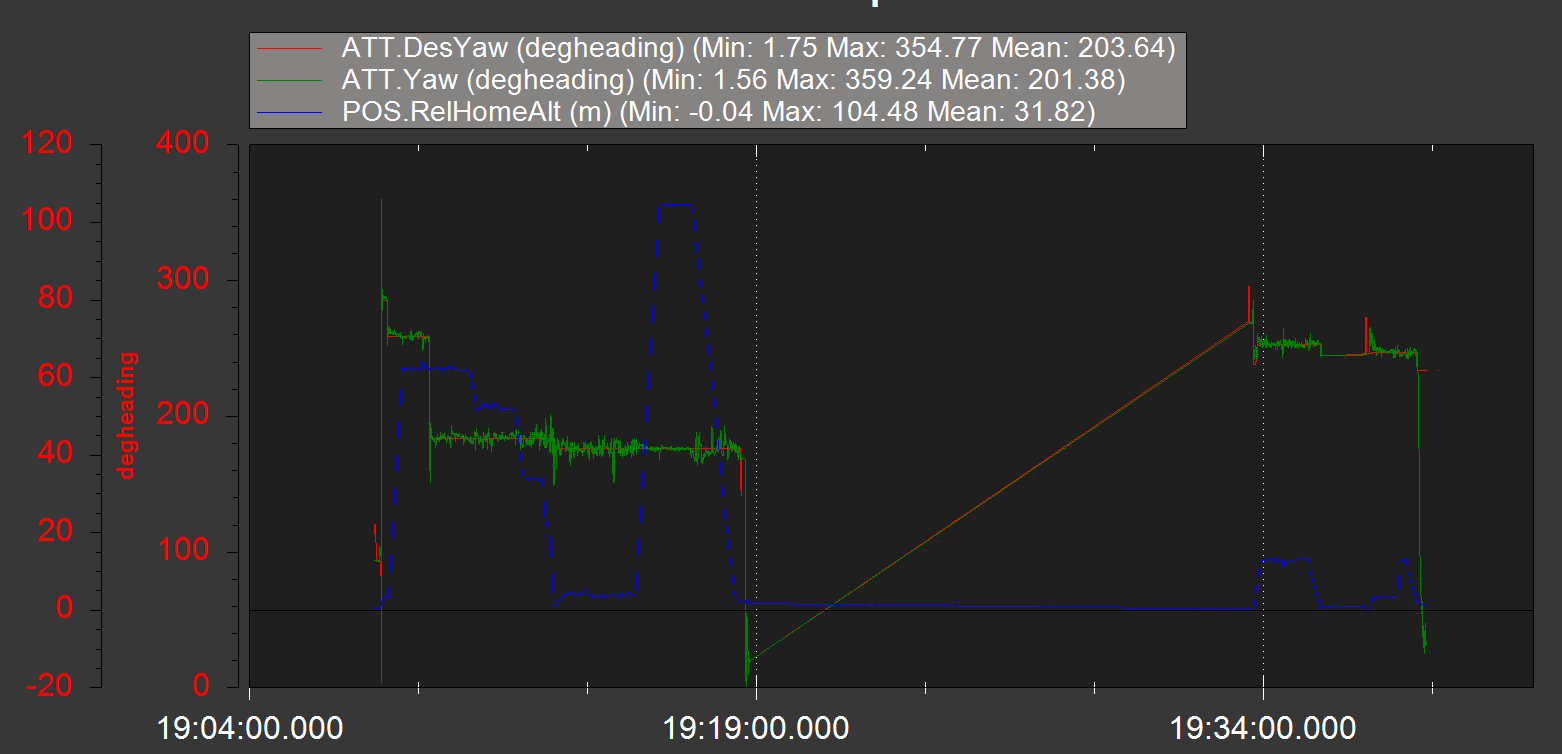
There’s a significant physical yaw/motor imbalance like motor mounts are twisted on the frame, or the frame itself is twisting. People have even found CW and CCW props are not always producing the same amount of thrust.
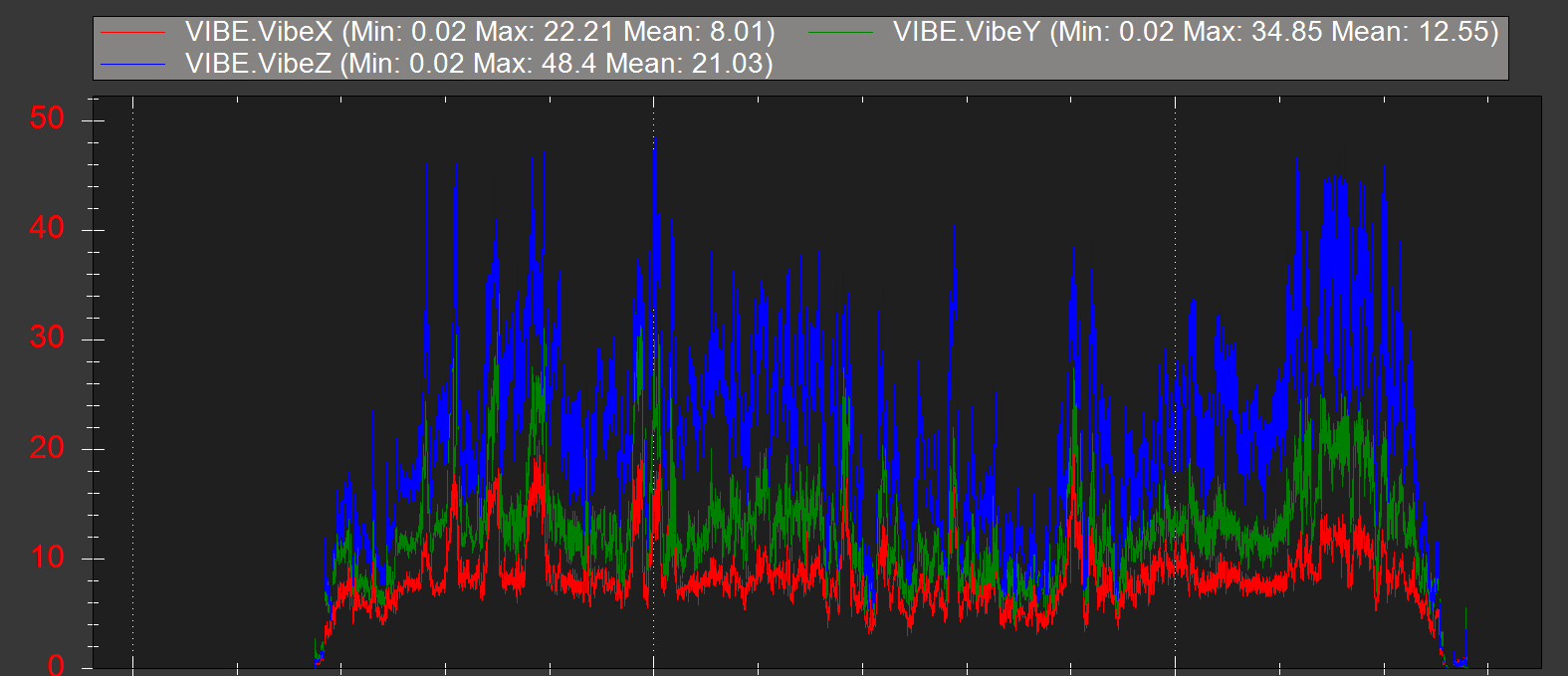
You’ve got some high vibrations there, you will want to look at prop balance and also antivibration mounting of the flight controller. Secure any loose wiring too.
I suggest you dont stop at the yaw problem though!
You’ve got a lot of default values there. You really need to use this spreadsheet or the MissionPlanner plugin ( Alt A on the keyboard) to set some parameters based on your quad, and then run through the tuning guide.
Since you said it rolls after you launch, you might want to redo the accel and RC calibrations again.
Check you transmitter trims are NOT set, but all centered.
Dealt with this as well. The motors are quite sensitive to being just a tiny bit rotated. Took me a number of flights to get the thrust so its pointed straight down. My bubble level would say it was level but the logs said otherwise
Thanks for mentioning props might produce varying thrust, Shawn. I hadn’t considered this and been using cheap props as I had a couple mishaps early (thinking I would switch to better props when I ironed out everything).
The vibrations are a physical problem and you must definitely fix them before going to autotune.
It is risky to fly in anything other than Stabilise mode if you are getting vibration warnings.
Once you have vibes fixed, you can set up Harmonic Notch filter properly and do Autotune. We’ve got a 700mm/2.5kg quad with V5 Nano that performs like something half it’s size after that process. Elsewhere I might have called it a 650mm frame, but I measured it and it is really 700mm.
Those frames are a bit too flexible and can enhance the control issues - but they do usually work in the end.
You will probably need to balance all the props (usually evident in X and Y vibrations) and maybe improve whatever is mounting the flight controller now, something like in this discussion:
Since you are using the Pixhawk 4 from Holybro it looks like on their web site they just use/sell the foam mounting pads. That may not be enough, or you might have done something wrong.
Make sure the wires aren’t pulling tight on the flight controller, rubbing against it or vibrating around unnecessarily in the prop wash.
Also keep in mind if you add weight, like a camera, you will probably need to increase the prop size to 9 or 10 inch.